Communication in Simulink
Vehicle network communication in Simulink® using XCP over CAN or UDP
The Vehicle Network Toolbox™ block library includes a set of XCP communication blocks, divided into two groups, XCP CAN and XCP UDP, which allow you to perform XCP communication over CAN or UDP in Simulink models.
Blocks
Topics
- Open the Vehicle Network Toolbox XCP Block Libraries
Access the XCP block libraries.
- Vehicle Network Toolbox XCP Simulink Blocks
Overview of the Vehicle Network Toolbox XCP block libraries.
- Supported Block Features
Supported features of blocks in the Vehicle Network Toolbox block library.
- Timing in Hardware Interface Models
Determine block execution frequency and relate to real-world time.
Featured Examples
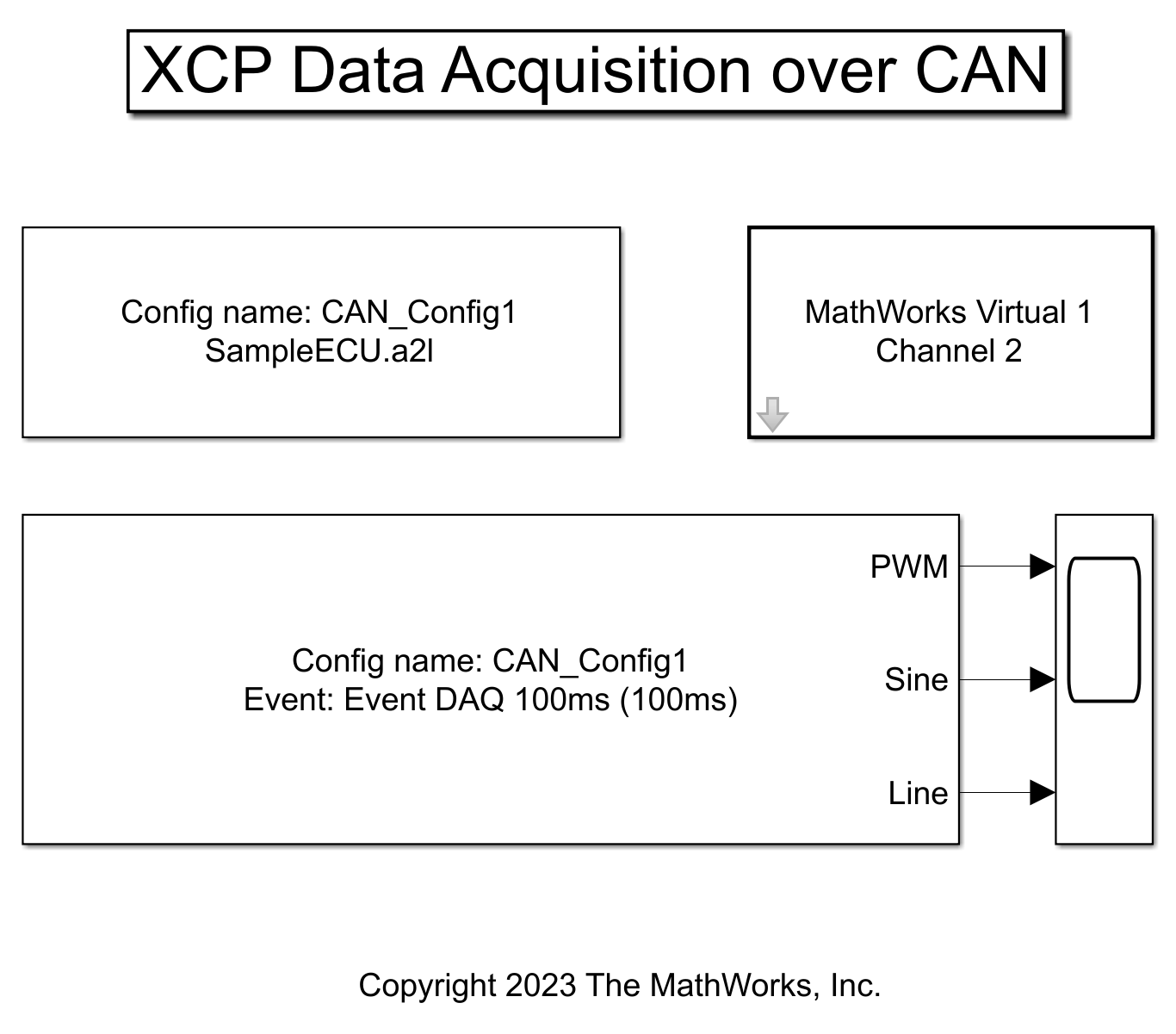
Perform XCP Data Acquisition in Simulink
Use XCP blocks to acquire measurement values in Simulink® from the XCP Sample server.