basisPursuit
Description
[
specifies options using one or more name-value arguments in addition to the input argument
in the previous syntax. For example, Xr,MSE,lambda] = basisPursuit(___,Name=Value)[Xr,MSE,lambda] =
basisPursuit(A,Y,RelTol=5e-2) sets a relative tolerance of
5e-2.
Examples
Load the ECG signal.
load wecgCreate a sensing dictionary that can be applied to the signal. Use the dct basis type.
D = sensingDictionary(Size=length(wecg),Type={'dct'});Obtain the best fit for the signal using the dictionary and basis pursuit. Obtain the minimum mean squared error.
[XBP,MSE,lambda] = basisPursuit(D,wecg); MSE
MSE = 1.2349e-04
Extract the sensing dictionary matrix. Use the matrix to construct the approximation.
A = subdict(D,1:D.Size(1),1:D.Size(2)); wecgR = A*XBP;
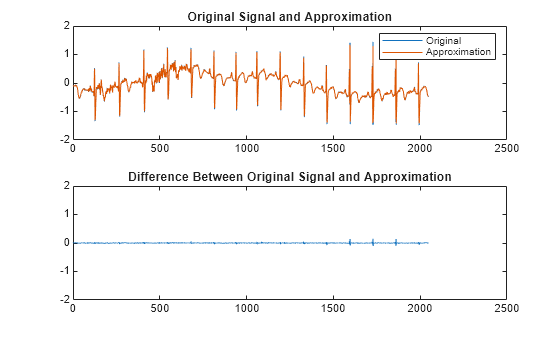
Obtain the norm of the difference between the original signal and its approximation.
norm(wecg-wecgR)
ans = 0.5029
Plot the signal and the approximation. Plot the difference at the same scale.
subplot(2,1,1) plot(wecg) hold on plot(wecgR) hold off legend("Original","Approximation") title("Original Signal and Approximation") ylimits = get(gca,"YLim"); subplot(2,1,2) plot(wecg-wecgR) ylim(ylimits) title("Difference Between Original Signal and Approximation")
Input Arguments
Name-Value Arguments
Output Arguments
More About
Extended Capabilities
Version History
Introduced in R2022a