3,651 results
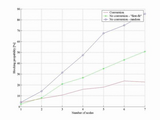
Blocking computation in WDM Networks for three different types of constraints.
matrixes. Three graph algorithms for shortest path computation are also in this toolbox (they are used for traffic matrix creation). References:[1] Alexander Birman, "Computing Approximate Blocking
Efficient pure-Matlab implementations of graph algorithms to complement MatlabBGL's mex functions.
of the capabilities.Functions depth first search (dfs) breadth first search (bfs) connected components (scomponents) maximum weight bipartite matching (bipartite_matching) Dijkstra's shortest

This function and example show shortest path routing based on Dijkstra algorithm.
This function performs Dijkstra algorithm based on the cost matrix, and shortest path can be found.
Compute/manipulate directed graph while retaining vertex labels

Dijkstra's algorithm to find the shortest path
This is an implementation of the Dijkstra´s algorithm, which finds the minimal cost path between two nodes. It´s supposed to solve the problem on positive weighted instances.

Computes shortest path between two nodes using Dijkstra algorithm
computes the shortest path to reach the destination.

MATLAB & Bash Scripts for localizing and interactivity visualizing intracranial electrode data

ClosestFrontier: Particle Mapping using global inputs
Version 1.0.0.0
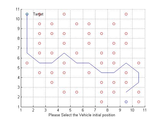
Aaron T. Becker's Robot Swarm LabThis code moves particles in a 2D map using global commands to discover all boundaries/frontiers.
in eachmove.The DIJKSTRA distance is calculated in each cycle to find the shortestdistance from all particles to the frontiers.There are 33 maps to choose from: 1 through 22 beingcreated through

Dijkstra algorithm is used for solving shortest path problem.
Dijkstra algorithm is used for solving shortest path problem. This is GUI version. The sample data is saved on *.mat.Usage :>> main

Useful functions for geometry processing, constrainted optimization and image processing.
Dijkstra's Algo to find shortest path, with ability to restrict the path through particular nodes
As mentioned in summary, This function used to find shortest path, with the ability to restrict the path through particular nodes. This function used popular method, known as Dijkstra's Algorithm

Use Dijkstra to find the shortest path to a Maze
toolbox to find the shortest path
Solves CS 2112 Fall 2019 from Cornell for shortest path
%% ShortestPath.m% % Solves CS 2112 Fall 2019 from Cornell for shortest path% Uses Dijkstra method from Cornell web page% https://www.cs.cornell.edu/courses/cs2112/2019fa/lectures/lecture.html?id=ssp
Core tools required for running Canlab Matlab toolboxes. The heart of this toolbox is object-oriented tools that enable interactive analysis

Dijkstra's pathfinding algorithm: computing a shortest path between an initial node to a final node.
list of nodes on shortest path.%% [shortpathv g]=GetPath(g,initv,finalv); Computing the shortest path% between init_node and final_node.

Robust pelectrophysiology tools with GPU acceleration
dijkstra algorithm as a shortest path finder in terms of cost very simple for the beginners
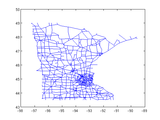
it finds the shortest path from the given network having given no of links between given no of nodes and plots the given network as well as the modified network having shortest path in terms of cost
Dijstra algorithm to solve shortest path problem.
This algorithm is to solve shortest path problem.Usage[cost rute] = dijkstra(graph, source, destination)note : graph is matrix that represent the value of the edge. if node not connected with other

Dijkstra's algorithm allows us to find the shortest path between any two vertices of a graph.
Dijkstra's algorithm allows us to find the shortest path between any two vertices of a graph. It differs from the minimum spanning tree because the shortest distance between two vertices might not
Finds Shortest Distance between nodes using Dijkstra Algorithm.
~This function can be used to find the shortest distance between nodes.~ This function uses Dijkstra Algorithm.~ This function can be used for Directional as well as Non-Directional graphs.~This
Based on Yen’s algorithm, returns the K shortest paths between a source and a destination.
This function is based on Yen's k-Shortest Path algorithm:J. Y. Yen, "Finding the K shortest loopless paths in a network", Management Science 17:712–716, 1971.It returns: 1) [shortestPaths]: the list

Calculate neutral surfaces in the ocean
/ - create topobaric surfaces, modified topobaric surfaces, and orthobaric surfaces./LICENSE - license./ns_add_to_path.m - function to add relevant subfolders to
A modification of code published by Jorge Barrera to return all paths that tie for shortest path.
this modification because I found that no implementation of Dijkstra's Algorithm available on Mathworks File Exchange would return multiple paths that tie for shortest. I have debugged this modification
K shortest paths in a graph represented by a sparse matrix (Yen's algorithm)
Version 1.4.0.0
El-ad David AmirDetermine the K shortest paths from node S to node T.
the sparse matrix G. DIST are the K distances from S to T; PATH is a cell array with the K shortest paths themselves.the shortest path algorithm used is Dijkstra's algorithm (graphshortestpath).**Please
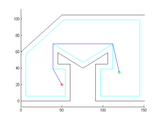
A set of functions to identify the shortest path between two points inside a closed polygonal arena
The set of functions are used to identify the shortest path between two points inside a closed polygonal arena. In the case of negotiating an obstacle, the path chosen will be such that it follows
Computes shortest path between two points in the plane, avoiding obstacles.
SHPATH - shortest path with obstacle avoidance (ver 1.3) Given a "terrain" matrix consisting of zeros (for open space) and ones (for obstacles), this function computes the shortest path between two

A simple, efficient sparse implementation of the original Bellman-Ford-Moore Shortest Path Algorithm
Over the years I have looked at many Shortest Path FEX submissions. Most,if not all of these, were implementations of Dijkstra's algorithm for dense adjacency matrices.These submissions had very

Gives the shortest node-to-node distance along the edges of a graph for all node combinations.
ALLSPATH - solve the All Pairs Shortest Path problemRapidly returns the shortest node-to-node distance along the edges of a graph, for all nodes in the graph.USAGE: B = allspath(A)A = input distance

This function and attached examples show finding shortest-paths (including cyclic paths) from a dire
Given adjacent matrix (transmat) and starting/ending node (pathS, pathE), this function finds the shortest-path (path) that connecting pathS and pathE, and returns the cost (cost):[path
A shortest path algorithm with external obstacle avoidance
A shortest path algorithm (based on Dijkstra's algorithm) with obstacle avoidance; the agent (robot) is represented as a single point, but the dimensions of the obstacles are inflated to account for
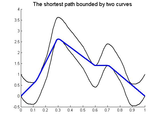
finds the shortest path bounded between low(t) and high(t).
find the shortest Euclidean path that is boundedby the functions low(t) and high(t).the algorithm is based on Dijkstra shortest path search algorithmsyntax:[ty y] =

find the shortest path from any node to any node in a network
denotes the shortest distance between vertices 'i' and 'j', and a matrix (P) that denotes the next vertex 'k' on the path from vertex 'i' to vertex 'j'

Another single-function implementation of Dijkstra's Algorithm for shorter path finding in a directed matrix-graph
A single-function implementation of Dijkstra's algorithm for shorter path finding in a directed matrix-graphDidactic reference of Dijkstra's algorithm at: https://youtu.be/bZkzH5x0SKU% Matrix-Graph

Dijkstra's algorithm graphical user interface
"DA GUI" is a GUI application dedicated to the edition of graphs and the determination of the shortest path through Dijkstra's algorithm. The application allows the followings operations:-Edition of
NOCAD - Network based Observability and Controlability Analysis of Dynamical Systems toolbox
Version 1.0.0.0
Janos AbonyiNetwork theory based analysis of controlability and observability of state space models
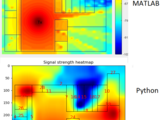
Multi wall (COST231) Signal Propagation Models + Python Code
Version 3.0.0.0
Salaheddin HosseinzadehEstimates the propagation loss using COST231 & free-space path loss models
Estimates the path loss using free space, and COST231 models. Provides an estimation map of signal strength. This a 2D line of sight method, that accounts for the individual walls between the
Full path name for partial or relative path
GetFullPath - Get absolute path of a file or folder nameThis function converts a partial or relative name to an absolute full path name. The fast Mex works on Windows only, but the M-file runs on
Allows the user to transfer your search path from an old MATLAB release to a new release
I seem to be constantly replacing my old MATLAB release with a new one. So generally two releases a year, plus two beta versions per year. Each time, I need to update the search path for the new

Function calculates shortest distance between two lines presented by two points for each line.
dimensions (3 in 3D).d - shortest distance between two linesPc,Qc - points where exists shortest distance dEXAMPLE:L1=rand(2,3);L2=rand(2,3);[d Pc Qc]=distBW2lines(L1,L2)Functions of lines L1,L2 and shortest
Function computes the shortest distance between two line segments.
Computes the shortest distance between two line segments given start and end points for each. Adapts the algorithm found on Dan Sunday's website
A tutorial that presents the A* search algorithm for determining the shortest path to a target.
The A* search algorithm is a simple and effective technique that can be used to compute the shortest path to a target location. This tutorial presents a detailed description of the algorithm and an

Finds the lowest cost path on an image from one point to another
1) Simple version of Dijkstra that supports sparse matrices as an input2) im2graph for converting an image to graph representation (sparse distance matrix). Supports both 4 connected and 8 connected

best routs found with dijkstra's algorithm
that connects 1st node with each of rest nodes. Nodes can resend packets.test1_random_nodes.m - main script, run to display routsdijkstra.m - auxilary function, find optimal routs with dijkstra

Finding the shortest path between two dots.

Solve the path planning problem of going through a vector field of wind in the least possible time using MATLAB and Optimization Toolbox.
This demo shows how to use MathWorks products to solve a path-planning problem.The objective is to find the optimal path (path of least time) through a randomly generated vector field of wind values
simple dijkstra function for large networks using spare matrix for non-existing links
simple dijkstra function for large networks using spare matrix for non-existing links

Discretizing (tiling) the input map into a grid graph, and finding shortest path in non-convex map
Version 1.0.0.0
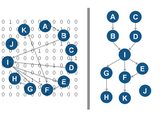
Reza JavanmardThis package converts an input map (image) into a grid graph
This package might be useful for the people who are working in robotic area or artificial intelligence. It contains: tiling or discretizing the input map, path planning (shortest path), sparse grid

The shortest distance(orthogonal distance) from a point to Ellipsoid or Hyperboloid
Compute The shortest distance(orthogonal distance) from a point to Ellipsoid or Hyperboloid(x/a)^2+(y/b)^2+(z/c)^2=1 standart Ellipsoid equation centered at the origin(x/a)^2+(y/b)^2-(z/c)^2=1

trace single object's contour via the classic shortest path algorithm
shortest path routing is in 'cShortestPath', which with computational complexity of O(N*log(N)), where N is the perimeter of the object.b. the input image must contains only one object(white area.)

Graph package for molecular biologist
, clustering coefficient, all-pair shortest path (amazingly fast, great if you have 64-bit) and so on. It also do plotting the graph with force directed layout. The graph can be generated from various input
Solve the shortest path problem with dynamic programming
This code was designed for solving the shortest path problem with dynamic programming approach. It can run on large-scale problem as your required. Firstly, user must write the window.m file as this

Geodesic (shortest path) algorithm for triangular mesh (triangulated 2D surface in 3D).

Use to find shortest path between node by random weight.
Use to find shortest path between node by random weight.

Three path-finding algorithms demonstrated side by side: Dijkstra's, A*, and greedy best-first.
also receive two other path-finding approaches: Dijkstra's algorithm, and greedy best-first. What is more, in the main script (demoall.m), you can change the size of the fields, the percentage of walls

This is the simple Dijkstra methode to find the shortes path on a shell.
This is the simple Dijkstra methode to find the shortes path on a shell. Put in the start p and target point q and the Matrix in doube format Matrix then you get the path. The first component of the

Class for handling file system paths with short and readable code
# PathClass for working with filesystem paths in MATLAB with short and readable code.[Examples](#Examples) [Requirements](#Requirements) [Installation](#Installation) [Reference](#Reference
Finds all pair shortest path.
Algorithm computing the shortest-dynamic-path-length between all pairs of nodes in a dynamic network
This function computes the Shortest Dynamic Path Length defined in the paper "Understanding and Modeling the Small-World Phenomenon in Dynamic Networks - AD. Nguyen et al - MSWIM 2012" between all
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)