
Microsoft Kinect, OpenNI wrapper, Skeleton, Depth
This zip-file contains c++ wrapper functions for the Microsoft Kinect, OpenNI 1.* and OpenNI 2.* libary.This code is compatible with Matlab 32bit and 64bit, Windows, MacOs and Linux.Note!, OpenNI 2
- 22.3K (All time)
- 7 (Last 30 days)
- 4.5 / 5
- Community
-
6 Jun 2013

Simulink Support for Kinect is a set of Simulink blocks interfaced with OpenNI and Kinect SDK.
Simulink Support for Kinect consists of IMAQ, Image, IR, Depth, Motion and Skeleton blocks to achieve real-time image data acquisition from Kinect devices such as Microsoft Kinect or ASUS Xtion PRO
- 9.9K (All time)
- 2 (Last 30 days)
- 4.6 / 5
- Community
-
1 Sep 2016

Image Acquisition Toolbox Support Package for Kinect For Windows Sensor
Acquire video and images from Kinect for Windows Sensor.
Image Acquisition Toolbox™ Support Package for Kinect® For Windows® Sensor enables you to acquire image sensor data directly into MATLAB® and Simulink®.This support package is functional for R2013a
- 23.4K (All time)
- 44 (Last 30 days)
- 4.0 / 5
- MathWorks
-
17 Jun 2026
Kin2 Toolbox
C++ wrapper functions for the Microsoft Kinect 2, using Microsoft SDK.Requirements:- Kinect2 SDK. http://www.microsoft.com/en-us/download/details.aspx?id=44561- Visual Studio 2012 or newer compiler
- 6.3K (All time)
- 4 (Last 30 days)
- 4.8 / 5
- Community
-
5 Jul 2017

A simple Simulink interface to the libfreenect Kinect driver for Linux-based systems
The VU-Kinect block for Simulink streams the color and depth video signals from the Microsoft Kinect sensor into the Simulink environment so that non-developers can access the capabilities of the
- 878 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
27 Jun 2012

Gesture Controlled Robotic Arm Using Kinect (Simulink Support For Kinect) and Arduino
This is a Simulink Model to Control a Robotic Arm By Gestures that are captured using Kinect Sensor.
This is a Simulink Model to Control a Robotic Arm By Gestures that are captured using Kinect Sensor. A Robot Arm is developed using Servo Motors that replicates the Right Arm Shoulder, Elbow and Hand
- 1.5K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
12 Jul 2016

Mex-file with pure "Kinect for Windows SDK" implementation.
The file includes mexfunction code calling "Kinect for Windows SDK" to receive depth data and color image from Kinect and a Matlab code to reshape the information matries. Please see the Readme.txt
- 2.7K (All time)
- 2 (Last 30 days)
- 4.9 / 5
- Community
-
18 Aug 2011

Kinect_NITE_PointViewer_matlab
Kinect, OpenNI wrapper, NITE PointViewer example, Hand Tracking, IR & Depth, matlab interface
This zip-file provides a matlab interface for the NITE PointViewer example, with some c++ wrapper functions written for the Microfost Kinect, OpenNI and NITE library.The work is based on Dirk-Jan
- 1.3K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
25 Apr 2011

Matlab+BIWI Kinect Head Pose Data base (Partial)
This mex files helps you access the compressed binary depth images in BIWI Kinect Head pose database
It is strongly recommended to download this submission:http://www.mathworks.com/matlabcentral/fileexchange/38219This is just a demo,but the above submission is complete in all respect.BIWI Kinect
- 457 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
25 Sep 2012

Fills in '0' depth value in kinect depth image with statistical mode of surrounding 25 values
The kinect depth image has pixels with values equal to the calculated depth of object/surface in view. However, areas that absorb or scatter the kinect IR (like glossy surfaces or sharp edges) are
- 1.1K (All time)
- 1 (Last 30 days)
- 3.7 / 5
- Community
-
12 Sep 2014
Getting Started Guide RoboNation
Examples to get started with MATLAB and Simulink for RoboNation competitions
- 3.8K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
15 Nov 2017

Gesture based control of robotic arm using Kinect
A robotic arm to replicate the arm gestures of a human operator.
This projects aims to develop a robotic arm, which can replicate the arm movement of a human operator. The human operator arm gestures are acquired from the Kinect’s depth image using skeletal
- 348 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
13 Jul 2017
Kinect and IMU data to Android App
In this example we send a fire extinguisher position and IMU data to an android app using Arduino.
our developments. We can send information to mobile devices: Data from Inertial measurement units, on-off buttons, potentiometers, Image segmentation data, as well as Kinect for Windows sensors
- 645 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
25 Jul 2016

Matlab Toolbox for Azure Kinect
Matlab interface for the Azure KinectRequirements:- Azure Kinect SDK. https://github.com/microsoft/Azure-Kinect-Sensor-SDK/blob/develop/docs/usage.md- C++ compiler- MATLAB 2015b or newer for
- 537 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
3 Nov 2020

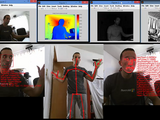
Video, Audio, Depth Stream and Skeleton tracking
This zip-file contains c++ wrapper functions for the Microsoft Kinect, Microsoft SDK Beta2 library.To compile the code to mex-files use the Microsoft Visual Studio (Express), and install Beta2
- 4.1K (All time)
- 2 (Last 30 days)
- 4.3 / 5
- Community
-
8 Nov 2011

- 3.1K (All time)
- 2 (Last 30 days)
- 4.8 / 5
- Community
-
26 Nov 2019

RESTORATION OF KINECT CALIBRATED RGBD DATA
Gets RGB and raw range datat and using calibration parameters gives a pointcloud
Use Raw range data provided by first generation of Kinect sensors, and provided calibration data by user, creates a corrected point-cloud. Also uses these calibration parameters to register RGB image
- 568 (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
6 Feb 2014

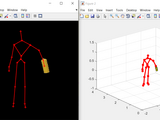
MATLAB AND SIMULINK HARDWARE CHALLENGE: Robot arm MatLab files
Controls a robot arm through the use of Kinect 2.0
This script is responsible for getting 3D data from the Kinect, where we have used the MATLAB interface for Kinect 2.0 by Terven Juan and Cordova-Esparza Diana. After we have gotten the 3D
- 353 (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
25 Jul 2016
Kinect integration with the EV3 robot
Installation instructionsThere are other integrations of Kinect and robots, but this is done exclusively in Matlab for the new LEGO EV3 robot. It was developed in Matlab 2014a and requires the Image
- 1.3K (All time)
- 4 (Last 30 days)
- 4.3 / 5
- Community
-
16 Feb 2023
MATLABによる画像処理・コンピュータービジョン・点群処理評価キット
MATLAB image processing, computer vision, and point cloud processing evaluation kit in Japanese
- 1.8K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
7 Apr 2022

Kinect-controlled Travel in Google Earth 3D
Fly around Google Earth 3D with the Kinect connected to MATLAB and Simulink
This Matlab script (together with a Simulink model) allows a user to travel (walk & fly) in the google earth 3d world. Using gestures in front of a Kinect for windows, user can control travel
- 1.2K (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
12 Nov 2013
Compile Mex-file using Kinect SDK with VS2010
It's a guide about compiling Mex-file using kinect SDK(Microsoft Version).
A guide introducing how to compile Mex-file using Kinect SDK and there is also a toy example based on Kinect SDK, which is called "record".
- 423 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
14 Aug 2011
Kinect Color Guided Robot (UPV)
Color tracking guided robot with GUI (download the remaining files from .txt Drive link)
spanish. If you are reading this because of the color tracking I recomend opening the "RobotBuscaObjetosKinect.m", collapse all functions, and search for the "detectObjectColor" and "trackObjectColor
- 60 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
2 May 2018

MICRO FACIAL EXPRESSIONS RECOGNITION using Kinect
This code implements the following paper: A SPATIAL AND FREQUENCY BASED METHOD FOR MICRO FACIAL EXPRESSIONS RECOGNITION USING COLOR AND DEPT
Muhammad Hossein, and S. Younes Mirinezhad. "Iranian Kinect face database (IKFDB): a color-depth based face database collected by Kinect v. 2 sensor." SN Applied Sciences 3.1 (2021): 1-17.
- 67 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Jan 2022

Learn how to control a basic Robotic System using a Desktop Computer, a Kinect and an Arduino.
- 2.1K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
27 Feb 2017
mxNiRealWorld2Pixel (an addition to the Kinect/OpenNI/NITE wrapper of D.Kroon))
takes an array of real-world coordinates (XYZ) and projects them into image coordinates (xy).
This is an addition to D. Kroon's OpenNI/NITE wrapper for interfacing with Kinect.e.g. use:XYZ = rand(10, 3);xy = mxNiRealWorld2Pixel(KinectHandles, XYZ);
- 604 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
15 Dec 2011

Utilizing SURF Features and KLT Tracking Algorithm in Augmen
Utilizing SURF Features and KLT Tracking Algorithm in Augmented Reality (AR), Using Kinect V. 2 with the Aim of Autism Therapy.
Hossein, Seyed Muhammad, et al. "Utilizing SURF Features and KLT Tracking Algorithm in Augmented Reality (AR), Using Kinect V. 2 with the Aim of Autism Therapy." Proceedings of the National
- 41 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
22 Nov 2021

Kinect Infrared (IR) and Depth Image Simulator
Simulation tool that generates noisy Kinect IR and depth images from a user inputted CAD model
This zip-file contains functions to simulate noisy Kinect infrared (IR) and depth images from a user inputted CAD model.This work was motivated by an extensive study of the sensor's underlying
- 1.3K (All time)
- 1 (Last 30 days)
- 4.6 / 5
- Community
-
22 Dec 2017

Fingerprint Recognition Out of Objects Surface Using
Fingerprint Recognition Out of Objects Surface Using Ordinary Cameras with the Aid of Magnifier Fluorescent Ultra Violet Macro Lens
Please unzip rar files, first. You just need to run 'FeatureClassification.m' and KinectStreamReecognition.m'. Mousavi, Seyed Muhammad Hossein, and S. Younes Mirinezhad. "Fingerprint Recognition Out
- 91 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
7 Dec 2021

Play tetris using the Nintendo Wii Balance Board and the Microsoft Kinect
Nintendo Wii Balance Board (controled by the center of pressure) and Microsoft Kinect (controled by arm positions). For further instructions related to the game, please refer to the original post by Matt Fig
- 238 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
20 Apr 2016
This project is to decoding the semaphore by extracting the skeleton by Kinect,
- 78 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
31 Mar 2017

Iranian Kinect Face Database (IKFDB)
Iranian Kinect Face Database (IKFDB)
Iranian Kinect Face Database (IKFDB)-Publishing any sample of IKFDB is illegal. -Samples inside the database could be used just in a scientific experiment and not for any other purposes. If you used
- 29 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
10 Dec 2021

3D Rendering Toolbox: Color image and depth map from mesh
A notable use case is to simulate RGB or Kinect (depth) camera images for computer vision applications.
both perspective and orthographic projection.A notable use case is to simulate RGB or Kinect (depth) camera images for computer vision applications.The codebase is compact, extensively documented, and
- 212 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
12 Mar 2024

Seven-Staged-Identity-Recognition-System-Using-Kinect-V.2-Se
Seven Staged Identity Recognition System Using Kinect V.2 Sensor
# Seven Staged Identity Recognition System Using Kinect V2 SensorThis repository presents the **Seven Staged Identity Recognition System Using Kinect V2 Sensor**, which implements a robust
- 56 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Dec 2024
Matlab GUI for recording synchronized color, depth, and skeleton from Kinect V2
Matlab GUI for recording synchronized color, depth, and skeleton from Kinect V2
- 59 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
2 Oct 2017

Genetic Programming for Making an Evolutionary Art
Using Genetic Programming for Making a New Evolutionary Artwork, Based on Human-Computer Interactions for Autism Rehabilitation
- 34 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Jan 2022

This file allows real time skeleton tracking using KinectV2.You can view the RGB image with the tracked skeleton joints overlaid.
This file can be used for real time skeleton tracking using KinectV2 and can be adapted for KinectV1. You can view the RGB image from the KinectV2 with the tracked skeleton joints overlaid. Data of
- 24 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
1 Nov 2023

How to apply Image Processing and Computer Vision wih MATLAB : Japanese MATLAB EXPO 2013
Script used in MATLAB EXPO 2013 in Japan on Oct. 29, 2013
picture. This script demonstrates local feature matching, point tracker, video stream processing(Due to limitation of the file size, movie files are not included)- Quick Demo using Kinect
- 1.8K (All time)
- 1 (Last 30 days)
- 1.0 / 5
- Community
-
1 Sep 2016
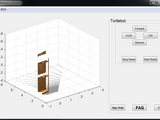
Application to control mobile robot with 3D vision sensor.
This application was designed to control a Turtlebot with a ROS interface. The application consists of three classes: 1) kinectViewer, 2) closedLoopTurtle, and 3) mobileRobotController. The main
- 2.3K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
1 Sep 2016

Creative Senz3D, Intel Interactive Gesture Camera (Time of Flight), Acquisition interface.
Senz3D a cheap 3D time of flight (TOF) camera is produced by Creative. The software provided by Intel® Perceptual Computing SDK 2013. The actual hardware is the "DepthSense 325" from SoftKinect
- 2.3K (All time)
- 1 (Last 30 days)
- 4.6 / 5
- Community
-
20 Feb 2014

Simulink for PCV (Point Cloud Viewer)
Simulink for PCV is a block for 3D Point Cloud View and wrapped native OpenCV library.
- 2K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
1 Sep 2016
A very simple wrapper that provides an interface to RGBD cameras through OpenNI v2.2
This submission was motivated by the Kinect Matlab submission that provided an interface to OpenNI version 1.5. There was a significant reworking of the interface in OpenNI v2.2 that necessitated a
- 1.8K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
14 Jun 2013
Extracting Data from BIWI Head pose data base into Matlab (Full)
This submission reads depth images and the ground truth frame by frame from the database.
BIWI Kinect Headpose Data base: This data base has 15000 head poses along with the ground truth of head orientation and location. Below is the URL
- 849 (All time)
- 1 (Last 30 days)
- 3.7 / 5
- Community
-
17 Sep 2012

Automatic-Infrared-Based-Volume-and-Mass-Estimation-System-f
Automatic Infrared-Based Volume and Mass Estimation System for Agricultural Products Along with Major Geometrical Properties
products using RGB-D (Red-Green-Blue and Depth) images, specifically leveraging depth data captured via a Kinect v2 sensor. The system improves upon traditional and recent methods, offering **high accuracy
- 42 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
9 Dec 2024

A new way to age estimation for rgb-d images, based on a new
A new way to age estimation for rgb-d images, based on a new face detection and extraction method for depth images
- 30 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
16 Nov 2021

On the Feasibility of Estimating Fruits Weights Using Depth
On the Feasibility of Estimating Fruits Weights Using Depth Sensors
- 28 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
11 Nov 2021

Introduction to Facial Micro Expressions Analysis
Introduction to Facial Micro Expressions Analysis Using Color and Depth Images (a Matlab Coding Approach)
experiment you have to cite it properly as bellow:Mousavi, Seyed Muhammad Hossein, and S. Younes Mirinezhad. "Iranian Kinect face database (IKFDB): a color-depth based face database collected by Kinect v. 2
- 119 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
15 Dec 2024
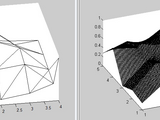
Contest to test programing skill
, computer vision, 3D markerless motion capture and home entertainment. The image on the left shows a Microsoft Kinect sensor (which includes a depth camera) pointing at the corner of a room. The orange
- 269 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
16 May 2011

Fuzzy Calculating of Human Brain’s Weight Using Depth Sensor
Fuzzy Calculating of Human Brain’s Weight Using Depth Sensors
- 24 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
17 Nov 2021
Generates kymographs of vessel diameter over time and calculates change in diameter (deltaD/D), baseline diameter and Max % Dilation.
- 40 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
3 Dec 2019
Quick Structured Mesh Generator
Fast generation of structured meshes given the vertices (MEX!). Interpolation/resizing of the mesh.
as meshes. Kinect or ToF cameras would be an option. gen_structured_mesh is a C mex file doing the actual meshing. It doesnt' produce sorted vertex-face list, so if we really require sorting, we
- 1.5K (All time)
- 1 (Last 30 days)
- 2.3 / 5
- Community
-
28 Jul 2011

Camera to Robotic Arm Calibration
Matlab toolbox for finding the transformation from a camera to a robotic arms base
- 1.1K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
10 Dec 2014

Age Estimation in Make-up (Cosmetics) Using Color and Depth
Age Estimation in Make-up (Cosmetics) Using Color and Depth Images
- 24 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
1 Dec 2021

Bees-Local-Phase-Quantization-Feature-Selection-for-RGB-D-Fa
Bees Local Phase Quantization Feature Selection for RGB-D Facial Expressions Recognition
features](https://github.com/user-attachments/assets/5105dddb-0a82-4c98-b330-8a1074580140)### OverviewThis project uses the **Iranian Kinect Face DataBase (IKFDB)**, containing RGB and depth images for five emotions. Our pipeline includes preprocessing, LPQ feature extraction, Bees
- 15 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
13 Dec 2024
A universal multisensorial Matlab toolbox for robot kinematic calibration
robotplanar (planes) - calibration using plane constrainsexternal device (external) - calibration using external cameras (laser sensor, kinect...)Approaches can be combined at one time. To set them, see
- 138 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
16 Jul 2024

The most advanced toolbox for neuroscience stimulus presentation, response collection and data collection.
- 17.8K (All time)
- 168 (Last 30 days)
- 4.0 / 5
- Community
-
2 Mar 2026