
Draw, manipulate and reconstruct B-splines.
estimate B-splines with known knot vector, given a set of noisy data points either with known or unknown associated parameter values.As regards the interactive interface, the user is shown a figure window
- 14.9K (All time)
- 3 (Last 30 days)
- 4.7 / 5
- Community
-
18 Feb 2021

Surface Reconstruction using Implicit B-Splines
Using Implicit B-Splines for Surface Reconstruction out of 3D point clouds.
Using Implicit B-Splines for Surface Reconstruction out of 3D point clouds.Please cite the following paper, in case of using the code:Rouhani M. and Sappa A.D., Implicit B-spline fitting using the 3L
- 6.2K (All time)
- 1 (Last 30 days)
- 3.6 / 5
- Community
-
27 Mar 2019

Fit, evaluate, differentiate non-uniform B-splines of any order - fast
fastBSpline - A fast, lightweight class that implements non-uniform B splines of any order Matlab's spline functions are very general. This generality comes at the price of speed. For large-scale
- 3K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
2 Sep 2011

- 1K (All time)
- 12 (Last 30 days)
- 5.0 / 5
- Community
-
27 May 2026
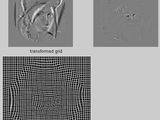
B-spline Grid, Image and Point based Registration
B-spline registration of two 2D / 3D images or corrsp. points, affine and with smooth b-spline grid.
Affine and B-spline grid based registration and data-fitting of two 2D color/grayscale images or 3D volumes or point-data. Registration can be done intensity / pixel based, or landmark /
- 33.2K (All time)
- 7 (Last 30 days)
- 4.8 / 5
- Community
-
16 Mar 2011
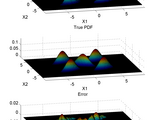
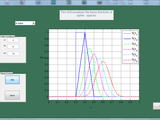
A toolbox for nonparametric probability function estimation using normalized B-splines
A MATLAB toolbox 'bsspdfest' implementing nonparametric probability function estimation using normalized B-splines was developed. The toolbox implements nonparametric probability function estimation
- 419 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
17 May 2023

Basic toolbox for polynomial B-splines on a uniform grid. OO overloading of common operators.
B-splines is a natural signal representation for continous signals, wheremany continous-domain operations can be carried out exactly once theB-spline approximation has been done.The B-spline
- 5.6K (All time)
- 2 (Last 30 days)
- 4.5 / 5
- Community
-
8 May 2011

Computes the B-spline approximation from a set of coordinates. Supports periodicity and n-th order approximation.
Computes the B-spline approximation from a set of coordinates (knots).The number of points per interval (default: 10) and the order of the B-spline (default: 3) can be changed. Periodic boundaries
- 1.1K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
11 Feb 2021

B-splines interpolation
Interpolación por basic splines. Para apoyo en las clases de creación de videojuegos de la Universidad Loyola, en Sevilla.
- 8 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
28 Mar 2024

Surface Reconstruction using Implicit B-Splines (FAST)
Given a 3D cloud of points accompanied by normals an implicit b-spline surface is reconstructed.
A fast surface reconstruction is implemented in this set of codes. Given a 3D cloud of points accompanied by normal vectors an implicit b-spline surface will be reconstructed.Please cite the
- 2.5K (All time)
- 1 (Last 30 days)
- 4.3 / 5
- Community
-
27 Mar 2019
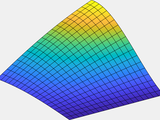
Spline toolbox for the definition, evaluation and visualization of spline curves and surfaces based on standard B-splines
The Spline toolbox allows the definition, evaluation and visualization of spline curves and surfaces based on standard B-splines. Furthermore, it provides an approximation algorithm with the
- 1.5K (All time)
- 7 (Last 30 days)
- 4.7 / 5
- Community
-
14 Oct 2021
- 763 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
2 Oct 2019

Shape Context Based Corresponding Point Models
Shape Context based nonrigid registration of 2D/3D objects, to build Active Shape Models
Shape Context is a method to get an unique descriptor (feature vector) for every point of an object contour or surface. This descriptor is used in combination with a b-spline free form deformation
- 10.5K (All time)
- 1 (Last 30 days)
- 4.8 / 5
- Community
-
26 Jan 2012
- 1.9K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
4 Jul 2023

- 885 (All time)
- 13 (Last 30 days)
- 5.0 / 5
- Community
-
17 Jul 2023
Workflow for chromatogram alignment using the semi-parametric time warping algorithm
Workflow for chromatogram alignment using the semi-parametric time warping algorithm
- 502 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
22 Apr 2015
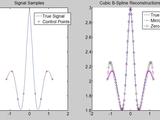
Regular Control Point Interpolation Matrix with Boundary Conditions
Creates Toeplitz-like matrices representing interpolation operations with edge conditions.
reconstruction using cubic B-splines with different possible boundary conditions. The screenshot above shows the output of this example, and illustrates how improved signal reconstruction is obtained using
- 2.6K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
28 Apr 2016
A recursive function that computes the b-spline basis atoms, it's very compact
a function to compute the b-spline points on a gridusage y = spline_recursion (u,n)n is the order of the spline u is the grid pointexample:t=linspace(-2,10,10000);y1=spline
- 434 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
13 Feb 2012

2D-DIC program that uses contiguous circular subsets, biquintic B-spline interp, and complex ROIs
- 7K (All time)
- 49 (Last 30 days)
- 5.0 / 5
- Community
-
8 May 2020

3D Free Form Image Registration Toolbox (GUI)
A toolbox for performing image registrations on 4D RTOG files or any other volumetric image.
This toolbox contains all the functions necessary for extraction and registration of medical RTOG images using a cubic-B-spline free form deformation technique. The optimization routine uses a
- 9.3K (All time)
- 2 (Last 30 days)
- 4.5 / 5
- Community
-
10 Feb 2012
H-infinity optimal causal IIR inverse filter for the cubic spline
This computes the H-infinity optimal causal filter (indirect B-spline filter) for the cubic spline.
Computes the H-infinity optimal causal filter (indirect B-spline filter) for the cubic spline.[INPUT]d: delay[OUTPUT]psi: the optimal filter psi(z) in a TF objectgopt: optimal valueThis file is based
- 458 (All time)
- 2 (Last 30 days)
- 4.0 / 5
- Community
-
3 Feb 2011
B-spline based repetitive neurocontroller
A non-local learning rule is employed in a repetitive neurocontroller based on B-spline network.
http://dx.doi.org/10.1109/IECON.2013.6700120 [**] weight constraints are used instead of forgetting and that turns out to robustify the controller. Hence, the same idea has been tested also in the B-spline based repetitive neurocontroller
- 790 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
20 Oct 2015
Sines and Splines - Variable Projection
Separating periodic signals from their aperiodic background
presents a method for modelling periodic signals having an aperiodic trend using the method of variable projection. In particular, this paper focuses on using B-Splines to model the a-periodic portion. The
- 150 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 Nov 2023
Construct coefficients of interpolating or smoothing BSplines from N-dimensional array, analytically
Class to enable BSpline signal and image processing. Based off of the papers:M. Unser, A. Aldroubi, and M. Eden, "B-Spline Signal Processing: Part I - Theory," IEEE Trans Sig Proc, 41(2):821-833
- 3.5K (All time)
- 1 (Last 30 days)
- 4.7 / 5
- Community
-
28 Apr 2008
Zero-phase filtering using B-Spline networks.
bsn1.m implements a zerophase low pass filter using a novel structure called B-Spline Networks (BSN).This function was originally developed for use with the LFFC (learning feedforward control).A nice
- 2.4K (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
6 Jun 2003
Some basic codes in Computer Aided Design
Some basic codes in Computer Aided Design
Surface16.Plot B-Spline Curve
- 194 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
31 Oct 2018
Chebfun V4 - old version; please download current version instead
Numerical computation with functions
- 14K (All time)
- 1 (Last 30 days)
- 4.8 / 5
- Community
-
29 Oct 2015
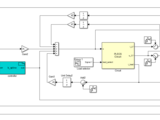
B-spline network based repetitive motion control
The concept of B-spline based repetitive control is explored within the frame of motion control.
remember to click the Build button in the S-Function block before attempting to run the model. More info: M. Malkowski, B. Ufnalski and L. M. Grzesiak, B-spline based repetitive controller revisited: error
- 364 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
20 Oct 2015
B-spline curves optimizer (BSO)
BSO is proposed by the Center for Engineering Application & Technology Solutions, Ho Chi Minh City Open University
A novel optimization algorithm based on the mathematical properties of B-spline curves, referred to as the B-Spline Curves Optimizer (BSO), is proposed by the Center for Engineering Application &
- 62 (All time)
- 22 (Last 30 days)
- -- / 5
- Community
-
14 Mar 2026
Fast implementation of De Boor's algorithm
Fast approach to evaluating a B-spline at a given point.
This function evaluates a B-spline at a given point. It performs De Boor's algorithm in reverse order, increasing the calculation speed.
- 116 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
11 Jan 2023
Zero-phase filtering using B-Spline Networks with dilation 2.
Similar to "bsn1.m", "bsn2.m" provides dilation 2 in the B-Spline network (BSN) which are used as a new way of performing approximate zero-phase low pass filtering.The transfer function of the
- 2K (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
9 Jun 2003

Basis functions for B-Splines (including nonrational and rational B-Splines).
Given the number of control points(N), the order of Splines (K), a sequence of knot vector (T), and the file name of txt format, the function basisfunc_NBS computes the nonrational (unweighted) basis
- 142 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
20 May 2016
Free-knot spline approximation
Least squares approximation of 1D data using free-knots spline
The purpose of this function is to provide a flexible and robust fit to one-dimensional data using free-knot splines. The knots are free and able to cope with rapid change in the underlying model
- 6.1K (All time)
- 3 (Last 30 days)
- 4.9 / 5
- Community
-
23 Mar 2024

- 1.6K (All time)
- 5 (Last 30 days)
- 5.0 / 5
- Community
-
14 Mar 2019

- 1.7K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
12 Jun 2019
Multiresolution Gabor-like transforms
Matlab implementation of the multiresolution Gabor filters in 1 and 2 dimensions.
- 1.1K (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
14 May 2012
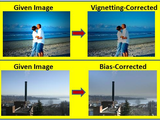
nu_corrector is a tool for correcting vignetting and bias of image.
with an MRI machine, or by non-uniform X-ray beam for CT images acquired with a CT scanner. Bias is a smooth field in any format, which can be represented by for example a bipoly model, B-Spline
- 4.8K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
11 May 2010

Non-rigid Registration between 2D Shapes
This software finds the best deformation to register 2D curves by exploiting curvature information.
- 1.1K (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
27 Mar 2019
arc length calculation for arbitrary B-splines
The program splineLength.m calculates numerically the arc length of an arbitrary B-splines.
The program splineLength.m calculates numerically the arc length of an arbitrary B-spline. Numerical integration uses "waypoints" for high precision.
- 73 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
13 Feb 2020
Ridgelet and Curvelet first generation Toolbox
Matlab codes for first generation curvelet and ridgelet transforms.
- 8.5K (All time)
- 3 (Last 30 days)
- 4.0 / 5
- Community
-
21 Mar 2012
B-spline network based repetitive controller (C-code)
C-code version of B-spline repetitive controller
This model is a C-code version of http://www.mathworks.com/matlabcentral/fileexchange/49023-b-spline-based-repetitive-neurocontroller uploaded by Bartlomiej Ufnalski.
- 507 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
19 Jan 2015

Chaotic B-Spline Curve and Surface Encryption
Encrypt B-Spline Curves and Surfaces using chaotic systems
The code implements the B-Spline curve and surface encryption method proposed in the following work:Moysis, L., Lawnik, M., Antoniades, I. P., Kafetzis, I., Baptista, M. S., & Volos, C. (2023
- 20 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
1 Apr 2026
modify_spline(spline,a,b,shiftx,shifty,scalex,scaley)
Spline object modification / transformation
A little piece of code enabling quick modification of spline objects: clipping, shifting, and scaling in both x, and y.
- 114 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
2 Mar 2015
Core tools required for running Canlab Matlab toolboxes. The heart of this toolbox is object-oriented tools that enable interactive analysis
- 479 (All time)
- 4 (Last 30 days)
- -- / 5
- Community
-
16 Aug 2024
B-spline based repetitive controller using iterative swarm learning for CACF VSI
Weights of B-spline controller are trained using PSO
https://www.mathworks.com/matlabcentral/fileexchange/47847-plug-in-direct-particle-swarm-repetitive-controller. The novelty is that B-spline based repetitive controller has weights trained using PSO.
- 125 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
9 Dec 2016

closed_cubic_bspline(P, varargin)
This is a function to draw a closed cubic B-Spline.
This is a function to draw a closed cubic B-Spline, based on by David Salomon (great book!), page 261 (closed cubic B-Spline curve).usage:closed_cubic_bspline(P,1) will compute and plot the closed
- 131 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
26 May 2016
This GUI visualizes the basis functions of spline spaces
This GUI visualizes the basis functions of spline spaces. Different bases can be chosen from the following: 1) B-Splines 2) Cardinal Splines
- 1.2K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
10 Apr 2014

Draw Cubic, Hermite, Bezier and B-Spline curves by entered points.
- 82 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Jun 2022

2D and 3D spline-based image registration
This is an image registration Matlab program developed based on B-spline composition and level sets.
In this code, the image is defined using B-spline level set functions and they are deformed by using a composition approach. The computation composed of efficient algorithms for calculating the
- 353 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
11 Jun 2020

A New Approach to the Construction of Subdivision Algorithms
This software package creates subdivision matrices for generalized quadratic and cubic B-spline subdivision surfaces and volumes.
# A-New-Approach-to-the-Construction-of-Subdivision-Algorithms-The-MATLAB-Software-PackageThis software package creates subdivision matrices for generalized quadratic and cubic B-spline subdivision
- 8 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
23 Jul 2025

Coefficients of the Cubics For Nonuniform Cubic Spline Interpolation
Coefficients of the Cubics For Nonuniform Cubic Spline InterpolationIncludes first or second derivative end conditions (so, as special cases, it includes natural and clamped cubic splines)If you want
- 116 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
6 Apr 2024
- 115 (All time)
- 3 (Last 30 days)
- -- / 5
- Community
-
31 Jan 2020
- 873 (All time)
- 7 (Last 30 days)
- 5.0 / 5
- Community
-
27 Nov 2023

Step file import of trimmed NURBS surfaces
Reads geometries from .stp/.step files. The type of geometries are NURBS surfaces. Multiple patches and trimmed patches are recognized.
functionThe main contribution is the step import function "import_STEP.m". It reads a geometry from a .stp/.step file. The type of geometry is limited to NURBS surfaces (including B-splines of course). Multiple
- 575 (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
20 Feb 2025

Personalized Statistical Modeling of Knee Soft Tissue
Personalized Statistical Modeling of Soft Tissue Structures in the Knee. Generative code
- 78 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
2 Feb 2023

- 2.1K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
1 May 2015