1,218 results

NXT Ballbot Model-Based Design based on Embedded Coder Robot NXT.
NXT Ballbot is a LEGO Mindstorms NXT version of Ballbot that is developed by Ralph Hollis at Carnegie Mellon University. The Ballbot is designed to balance itself on its single spherical wheel while

This is simulation for Self Balancing Robot. LQR Control for Balancing the robot & Feedback Linearization for tracking desired trajectory
This Folder contains simulation for Self Balancing Robot. LQR Control for Balancing the robot in vertical position. Feedback Linearization control for Trajectory Tracking Steps for Run the

Model of EV3 segway robot with LQR controller. Could be run on hardware (EV3)
- Build self-balancing Lego robot Gyroboy from scratch- Practice in control system design- Learn how the Model-Based Design works- Control Gyroboy from App Designer app or from Android- Have fun!HOW

This submission contains the model needed to implement reinforcement learning algorithm on an arduino based motorcycle.
The Arduino Engineering Kit offers 3 projects : Drawing Robot, Rover and a Motorcycle. In this submission, we show how to use reinforcement learning algorithm (Q-learning) to balance the motorcycle

NXTbike-GS Design based on Embedded Coder Robot NXT. and NXTway-GS

NXTway-GS Model-Based Design based on Embedded Coder Robot NXT.
NXTway-GS is a self-balancing two-wheeled robot built with LEGO Mindstorms NXT and a Hitechnic gyro sensor. This demo presents sample models and documents describe the following contents.How to Build

An LQR controller is designed for the LEGO balance robot and implemented in MATLAB/Simulink
In this project an LQR controller is designed to balance the LEGO balancer robot (Tutorial: Building BALANC3R – Robotsquare). LQR is a pole placement technique where the poles are located such that a

MATLAB and Simulink files to program the drawing robot, webcam controlled rover, and self-balancing motorcycle projects from AEK Rev 2.
whiteboard• A webcam controlled rover that navigates between reference points and moves objects with its forklift• A self-balancing motorcycle that maneuvers itself on varying terrain and remains upright using

MATLAB and Simulink files to program the drawing robot, mobile rover, and self-balancing motorcycle.
whiteboard • A mobile rover that navigates between reference points and moves objects with its forklift • A self-balancing motorcycle that maneuvers itself on varying terrain and remains upright using a

This is a system made in Simscape, simulating a wheel-legged robot. Multiple joints work together to achieve self-balancing.

Simulink model for an inverted pendulum (self balancing robot) with disturbance rejection.
This simulink file models a self balancing robot with disturbance rejection. Disturbances are in the form of a push force and tiny forces that mimics real life environment disturbance. Double click

This is a self balancing robot built from scratch using Simscape library in Simulink

for theis "risk management for mechtronics systems with mixed criticality
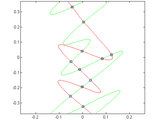
Fast computation of intersections and self-intersections of curves using vectorization.
- coordinates of the intersection points of L1 and L2. If no intersections are found, the returned P is empty. P = INTERX(L1) returns the self-intersection points of L1. To keep the code simple, the

Learn how to deploy an algorithm to an FPGA using MATLAB and Simulink.

Computes the self-intersections of a curve.
This function computes the locations where a curve self-intersects in a fast and robust way. The curve can be broken with NaNs or have vertical segments. Segments of the curve involved in each of the

Balancing generalized eigenvalue problem using Ward's algorithm.
BALANCE2 Balancing generalized eigenvalue problem [T1 T2] = BALANCE(A,B) computes matrices T1 and T2 that balance matrices A and B for the generalized eigenvalue problem by T1*A*T2 and
Lithium ion battery characterization, state estimation, cell balancing, and thermal management
index contains links to open each example.Demos:1. 3S-1P battery pack CCCV charge with passive balancing using Simscape Electrical. Charge / discharge cycling with passive balancing, including thermal
Self-Tuning Regulators (STR)
% this function to esimate the system and contoller parameter by using% Indirect self-tuning regulator contoller (model following)% estimation is done by one of the linear estimation model% The plant

Graph Analysis of Heider Balance Theory
The program presented here is to analyze the adjacency matrix by using the Heiderian Balance Theory. For more information about the analysis of Heider Balance Theory in social analysis refer to
simulates the self excitation of the induction machine

Simulink Modelling of Self Excited Induction Generator
This Simulink models a Self Excited Induction Generator.

Fuzzy self-tuning Flying Foxes Optimization for global optimization
This simplified Matlab demo code shows how to use the new Fuzzy self-tuning Flying Foxes Optimization to solve global continuous optimization problems.Researchers are allowed to use this code in

Reference code for the paper: Deep White-Balance Editing, CVPR 2020 (Oral).
Deep White-Balance Editing, CVPR 2020 (Oral)Mahmoud Afifi1,2 and Michael S. Brown11Samsung AI Center (SAIC) - Toronto2York UniversityOral presentationReference code for the paper Deep White-Balance
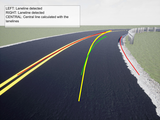
Entry for Simulink Challenge 2020. Includes a Simulink Model which runs a self-driving car with a single front camera in Unreal Engine.
In this project, we use the Unreal Engine to design a self-driving car. We mainly tackle the lane detection, vehicle detection, and path planning problems and try to generate safe reference paths for
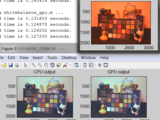
Use GPU in MATLAB to perform white-balance operation to input image.
Exact computation of the earth return impedance of overhead conductors above homogeneous earth.
evaluate to a closed-form expression, a scrutiny of Carson's historical (1926) paper reveals that such an expression exists and was actually presented therein. Functions Carson_Self and Carson_Mutual compute
Offers an enjoyable Model-Based Design experience using Simulink models with Lego robots
architecture and component definition, as well as, use of fixed- and floating-point designs.This demo includes three examples: Maze walking tricycle robot Line tracing tricycle robot Self balancing bi-wheeled

Region based method for segmenting and splitting images of cells in an unsupervised manner.

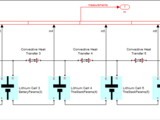
Passive Cell Balancing has been implemented for Lithium-ion Battery pack.
Passive Cell Balancing has been implemented for Lithium-ion Battery pack.The battery pack consists of two parallel strings where each parallel string consists of four series cells.The objective is to

This simulation is deal with the passive cell balancing.
This simulation is deal with the passive cell balancing for the battery management system. In which cell balancing of three cell is done.Both cells are balanced at 1100sec.
Matrix balancing/updating/estimation using the Generalized RAS approach

A simple and neat implementation of a self-organizing map algorithm
While there are many sources that provide the pseudo-code of a self-organizing map (SOM), I could not find a simple implementation that clarifies every step of this algorithm which was introduced by

This toolbox implements the well known split-step Fourier technique for solving nonlinear PDEs.
diverse problems such as temporal solitons, spatial self-focusing or exotic space-time effects.Currently the technique is limited to scalar fields.

Ahmed-ElTahan/Deterministic-Indirect-Self-Tuning-Regulator-One-Degree-Controller
Version 1.0.0.0
Ahmed ElTahanApplication of Indirect Self-tuning Regulator Adaptive Control. One degree controller
It's intended to apply the self-tuning regulator for a given system such as y z^(-d) Bsys Gp = ------ =
Fitness-Distance Balance (FDB): A New Selection Method for Meta-Heuristic Search Algorithms
Fitness-Distance Balance (FDB): A New Selection Method for Meta-Heuristic Search Algorithms

A genetic algorithm is used to train a neural network controller to balance a stack of balls.
A genetic algorithm is used to train a neural network controller to balance a stack of balls by applying a lateral force and a torque to the bottom ball. The capsim physics engine is used to produce
Collection and a development kit of Matlab mex functions for OpenCV library

White balance camera-rendered sRGB images (CVPR 2019)
commercial application.Related Research ProjectsWhite-Balance Augmenter: An augmentation technique based on camera WB errors (ICCV 2019).Deep White-Balance Editing: A multi-task deep learning model for

SRACS calculates the resonant frequencies and quality factors of self-resonant air-coils.
SRACS is a collection of functions for the analysis of self-resonant air-coils. It was developed for the analysis of wireless power transfer systems, but may be suitable for other applications like

Modelling of Self Excited Induction Generator
This code models a Self Excited Induction Generator.

Ahmed-ElTahan/Deterministic-Indirect-Self-Tuning-Regulator-Two-Degree-Controller-2nd-Method
Version 1.0.0.0
Ahmed ElTahanApplication of Indirect Self-tuning Regulator Adaptive Control. Two degree controller, 2nd Method.
# Deterministic-Indirect-Self-Tuning-Regulator-Two-Degree-Controller-2nd-MethodIt's intended to apply the self-tuning regulator for a given system such as y

m-file for SOM using a mesh of 2 dimension
m-file that is easy to understand and to implement self organizing map which is based on Kohonen Neural Network.
Load Flow Analysis by Solving Power Balance Equations for a Given IEEE Standard 6-Bus System.
We can get load flow parameters by solving power balance equations using newton-raphson method for any given system, although the program solves an IEEE standard 6-bus system. For any other system
Codes implementing lattice Boltzmann method for solving population balance equations
These codes implement lattice Boltzmann method (LBM) for solving 1D, 2D and 3D population balance equations (PBE) describing crystallization processes, and are based on the following papers[1] A
Self-terminating modal warning dialog with flashing icon

scatter wrapper that actually creates useful plots by default
Single Image Dehazing using multiple fusion technique

Learn how to verify an algorithm on FPGAs using MATLAB and Simulink.

Get the answers and plots for various formulaes of power electronics.
Given h is a self convolution result of function g, try to find out g from h using forward elimination or backword substitution.
Smart Grid Optimization
Smart Grid Load Balancing via CPS
A simple program for color balancing
A simple program for color balancing

it gives exact position and amount of mass to be added or removed for dynamic balancing
This 3-shot method requires displacement of 3 positions at 0,120,240 degrees and initial displacement to determine the position and magnitude of mass to be placed for balancing disks/shafts. The

リチウムイオンバッテリーの各種設計方法について具体的な設計方法を紹介します。 1. 等価回路モデリングとパラメータ推定 2. バッテリーパックのモデリング 3. セルバランス制御の設計とコード生成 4. 機械学習、深層学習を用いたバッテリー残寿命推推定とアルゴリズムの実装

This toolbox provides functions for maximizing and minimizing submodular set functions.
algorithm for trading off information and communication cost* sfo_pspiel_orienteering: pSPIEL algorithm for submodular orienteering* sfo_balance: eSPASS algorithm for simultaneous placement and balanced
Medical software for Processing multi-Parametric images Pipelines
Self Adaptive Noise Cancellation
This function performs self-adaptive noise cancellation on a signal x. The filter length is L, and mu is the adaptation rate. The output is a structure containing the filter weight and the error
A tutorial for micromechanical computations with elasticity, fabric and Eshelby tensors.

Population Balance Equation Solver
CAT is an open-source software designed to solve population balance equations as they typically arise in particulate processes and to analyze the results. brought to you by:Dave Ochsenbein, Automatic
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom(English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)