Implementing Motor Control using Simulink and NXP i.MX RT Crossover Processors
Daniel Popa, NXP
Peter Butko, NXP
Overview
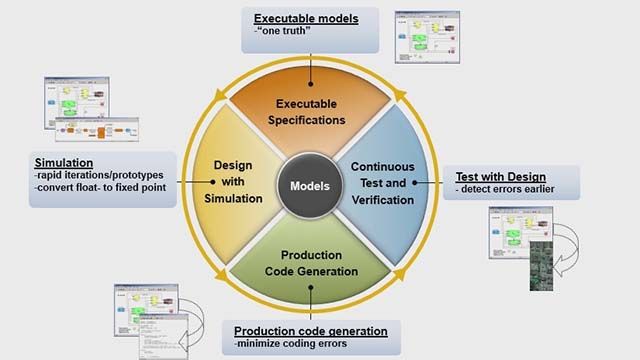
This webinar will show how to design and implement motor control algorithms using Simulink, Embedded Coder, and NXP i.MX RT crossover MCUs. We will introduce Model-Based Design to develop embedded control algorithms and demonstrate an automated path to production implementation on the NXP i.MX RT1060 MCU.
Starting with Field Oriented Control (FOC) algorithms modeled in Simulink, NXP engineers will show how sensorless control of a permanent magnet synchronous motor (PMSM) is implemented. We will use Embedded Coder to generate optimized code from the Simulink model and deploy it to the NXP microcontroller. The code-generation workflow will feature the use of the NXP Model-Based Design Toolbox, which provides an integrated development environment and toolchain for configuring and generating all the necessary software to execute complex applications on NXP MCUs. In addition, Model-Based Design Toolbox includes a Simulink embedded target for NXP MCUs and peripheral device blocks and drivers.
Highlights
- Implementing a permanent magnet synchronous motor (PMSM) with sensorless Field Oriented Control (FOC)
- Generating optimized, production ready code with Embedded Coder
- Deploying code to an NXP i.MX RT1060 MCU using the NXP Model-Based Design Toolbox
- Configuring peripherals with NXP MCUXpresso® and online application monitoring using NXP FreeMASTER
About the Presenters
Brian McKay is a Technical Marketing Manager specializing in MathWorks solutions for embedded systems customers, including those featuring NXP hardware. He has been building customer solutions that combine MathWorks software with embedded hardware for over 20 years.
Daniel Popa is a Product Manager & Architect, in the Automotive Processing Group at NXP. He graduated from the Politehnica University of Bucharest in Romania with a master’s degree in electrical engineering. He joined NXP in 2008 where he is responsible for Model-Based Design Software solutions for NXP Products.
Peter Butko is a Software Engineer for the NXP Motor control team since 2016. He focuses mainly on permanent magnet synchronous motor (PMSM) advanced control using NXP i.MX RTs crossover processors. Peter received a master’s degree in electric drives and PhD in power electronics from the University of Zilina. His thesis dealt with intelligent drives with asynchronous motors with reduced energy consumption.
Recorded: 30 Jul 2021
Featured Product