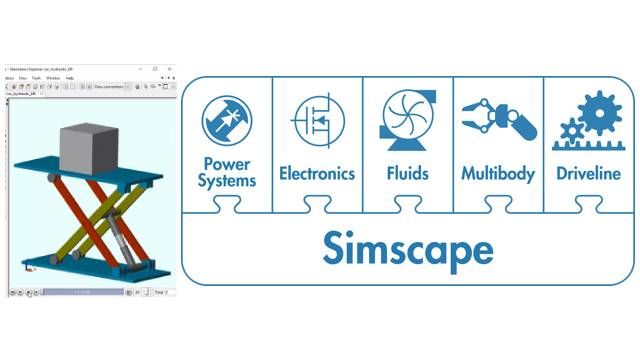
In this webinar we will demonstrate how to configure models containing Simscape physical networks to run in real time. We will explain the tradeoff of simulation speed and accuracy in real-time simulation, and explain the settings you can adjust to balance this tradeoff. The demonstration is performed on a model of a pneumatic actuation system, but the concepts have been applied to models spanning hydraulic, electrical, mechanical, and other physical domains.
This webinar will include demonstrations and explanations to show:
• The challenge of moving from desktop simulation to real-time simulation
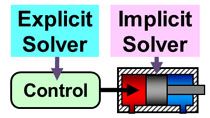
• How to choose a fixed-step solver
• Why fixed-cost simulation is critical for real-time simulation and how to configure a fixed-cost simulation
• How MATLAB can be used to accelerate this process
• Advances in Simscape that make it easier to get models to run in real-time
Real-time simulation of multidomain physical system models (mechanical, electrical, hydraulic, etc.) requires finding a combination of model complexity, solver choice, solver settings, and real-time target that permit execution in real time. A better understanding of the tradeoffs involved in each of these areas makes it easier to achieve this goal and use Model-Based Design to reap the benefits of using virtual systems prior to building hardware prototypes.
In this webinar we use xPC Target as our real-time simulation platform, but the concepts and settings described in this webinar apply to other real-time platforms as well. In this webinar, we do not focus on the selection of real-time hardware.
Presenter: Steve Miller
Presenter Bio: Steve is responsible for the technical marketing of the physical modeling tools at The MathWorks. Steve joined The MathWorks as an Application Engineer in 2005 and moved to the Design Automation Marketing group at The MathWorks in 2006. Prior to that, Steve worked at Delphi Automotive in Braking Control Systems and at MSC.Software Adams consulting in various capacities at Ford, GM, Hyundai, BMW, and Audi. Steve has a B.S. in Mechanical Engineering from Cornell University and an M.S. in Mechanical Engineering from Stanford University.