Build Full Electric Vehicle Model
The electric vehicle (EV) reference application represents a full electric vehicle model with a motor-generator, battery, direct-drive transmission, and associated powertrain control algorithms. Use the electric vehicle reference application for powertrain matching analysis and component selection, control and diagnostic algorithm design, and hardware-in-the-loop (HIL) testing. To create and open a working copy of the EV reference application project, enter
The electric vehicle reference application is configured with a mapped motor and battery.
Note
The Virtual Vehicle Composer configures the reference application. If you want to change the configuration, use the Virtual Vehicle Composer to specify a different powertrain and vehicle. See Get Started with Virtual Vehicle Composer.
This diagram shows the powertrain configuration.
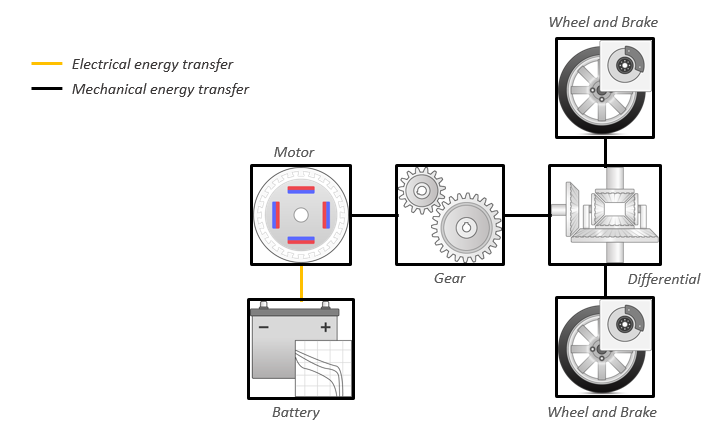
This table describes the blocks and subsystems in the reference application.
| Reference Application Element | Description |
|---|---|
Analyze Power and Energy | Double-click Analyze Power and Energy to open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level. For more information about the live script, see Analyze Power and Energy. |
Implements the driver scenario. The subsystem contains variants that generate maneuver-specific driver reference velocity, path, and action signals. | |
Implements the environment model, including road grade, wind velocity, and ambient temperature and pressure. The subsystem contains variants that generate environment- and terrain-specific signals. | |
Implements the driver model that generates acceleration, braking, gear, and steering commands. The subsystem contains variants that interact with typical driver vehicle inputs, such as steering, accelerator, decelerator, and transmission commands. | |
Controllers | Implements the electric vehicle control unit (VCU) and the battery management system (BMS). Note Some controllers implement Stateflow® logic. The reference application runs without Stateflow by default, but any logic modification requires Stateflow. |
Vehicle | Implements a passenger car that contains a motor-generator, battery, and direct-drive transmission. |
| Visualization | Displays vehicle-level performance, battery state of charge (SOC), and equivalent fuel economy results that are useful for powertrain matching and component selection analysis. |
Evaluate and Report Power and Energy
Double-click Analyze Power and Energy to open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level.
The script provides:
An overall energy summary that you can export to an Excel® spreadsheet.
Electric plant and drivetrain plant efficiencies.
Data logging so that you can use the Simulation Data Inspector to analyze the powertrain efficiency and energy transfer signals.
For more information about the live script, see Analyze Power and Energy.
Controllers
The controller subsystem implements the electric vehicle control unit (VCU) and the battery management system (BMS).
To determine the motor torque and brake pressure commands, the reference application implements a supervisory controller. Specifically, the powertrain control module (PCM) implements:
Regenerative braking control
Motor torque arbitration and power management
Converts the driver accelerator pedal signal to a torque request.
Converts the driver brake pedal signal to a brake pressure request. The algorithm multiplies the brake pedal signal by a maximum brake pressure.
Implements a regenerative braking algorithm for the traction motor to recover the maximum amount of kinetic energy from the vehicle.
Implements a virtual battery management system. The algorithm outputs the dynamic discharge and charge power limits as functions of battery state of charge (SOC).
Implements a power management algorithm that ensures the battery dynamic discharge and charge power limits are not exceeded.
Vehicle
The Virtual Vehicle Composer configures the electric vehicle reference application vehicle subsystem. If you want to change the configuration, use the Virtual Vehicle Composer to specify a different powertrain and vehicle
The electric vehicle has the characteristics provided in this table.
| Element | Description |
|---|---|
Battery | Implements the Datasheet Battery block to configure a lithium-ion battery pack. |
Wheels and Brakes | Implements the Longitudinal Wheel block with disc brakes to configure drivetrain for front wheel drive. |
Vehicle Body | Implements the Vehicle Body 3DOF Longitudinal block to configure vehicle for 3 degrees-of-freedom. |
Electric Machine | Implements the Mapped Motor block. |
See Also
Interior PMSM | Interior PM Controller | Datasheet Battery | Drive Cycle Source | Longitudinal Driver | Mapped Motor