freqsep
Slow-fast decomposition
Syntax
Description
[
computes the decomposition where G1,G2]
= freqsep(G,[fmin,fmax])G1 contains all modes with
natural frequency fmin ≤
ωn ≤
fmax and G2 contains the remaining modes. (since R2023b)
Examples
Load a dynamic system model.
load numdemo Pd bode(Pd)
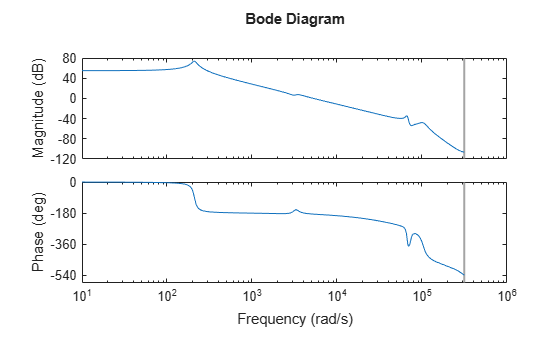
Pd has four complex poles and one real pole. The Bode plot shows a resonance around 210 rad/s and a higher-frequency resonance below 10,000 rad/s.
Decompose this model around 1000 rad/s to separate these two resonances.
[Gs,Gf] = freqsep(Pd,10^3); bode(Pd,Gs,Gf) legend('original','slow','fast','Location','Southwest')
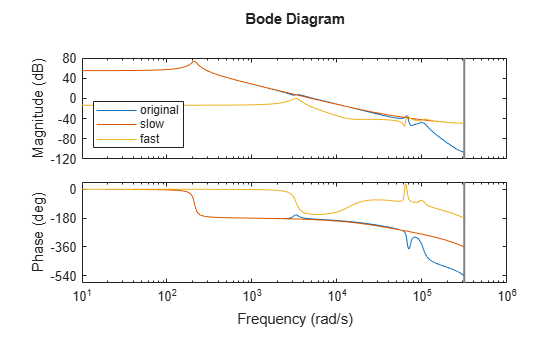
The Bode plot shows that the slow component, Gs, contains only the lower-frequency resonance. This component also matches the DC gain of the original model. The fast component, Gf, contains the higher-frequency resonances and matches the response of the original model at high frequencies. The sum of the two components Gs+Gf yields the original model.
Decompose a model into slow and fast components between poles that are closely spaced.
The following system includes a real pole and a complex pair of poles that are all close to s = -2.
G = zpk(-.5,[-1.9999 -2+1e-4i -2-1e-4i],10);
Try to decompose the model about 2 rad/s, so that the slow component contains the real pole and the fast component contains the complex pair.
[Gs,Gf] = freqsep(G,2);
Warning: One or more fast modes could not be separated from the slow modes. To force separation, relax the accuracy constraint by increasing the "SepTol" factor (see "freqsepOptions" for details).
These poles are too close together for freqsep to separate. Increase the relative tolerance to allow the separation.
[Gs,Gf] = freqsep(G,2,SepTol=5e10);
Now freqsep successfully separates the dynamics.
slowpole = pole(Gs)
slowpole = -1.9999
fastpole = pole(Gf)
This example shows how to decompose a model and retain the modes in a specified frequency range using freqsep.
Load the model Gms and examine its frequency response.
load modeselect Gms bodeplot(Gms)
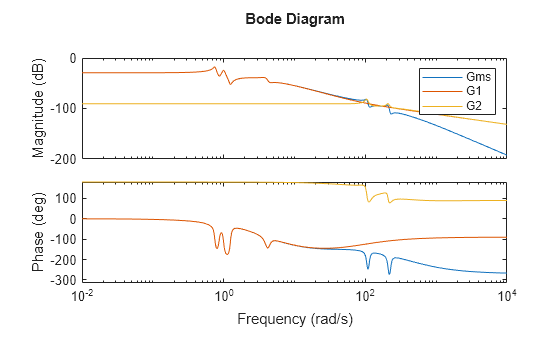
Use freqsep to retain the dynamics in the frequency range 0.1 rad/s to 50 rad/s.
[G1,G2] = freqsep(Gms,[0.1,50]);
In this decomposition, the output G1 contains all poles with natural frequency in the range [0.1,50] and G2 contains the remaining poles.
bodeplot(Gms,G1,G2) legend