predictAndUpdateState
Class: dlhdl.Workflow
Namespace: dlhdl
Predict responses by using a trained and deployed recurrent neural network and update the deployed network state
Since R2022b
Syntax
Description
Y = predictAndUpdateState(workflowObject,sequences)sequences using the deployed network and
updates the network state. The method does not initialize the network state before
running. This method supports recurrent neural networks only. The specified network must
have at least one recurrent layer, such as an LSTM layer or a custom layer with state
parameters.
[
predicts responses and updates the network state with one or more arguments specified by
optional name-value pair arguments.Y,performance] = predictAndUpdateState(workflowObject,sequences,Name,Value)
Input Arguments
Name-Value Arguments
Output Arguments
Examples
This example shows how to create, compile, and deploy a long short-term memory (LSTM) network trained on waveform data by using the Deep Learning HDL Toolbox™ Support Package for Xilinx FPGA and SoC. Use the deployed network to predict future values by using open-loop and closed-loop forecasting. Use MATLAB® to retrieve the prediction results from the target device.
Waveform Data Network
The network attached to this example was trained using the Time Series Forecasting Using Deep Learning. This example uses the WaveformData.mat data set, which contains 2000 synthetically generated waveforms of varying lengths with three channels. This example uses a trained LSTM network to forecast future values of the waveforms given the values from the previous time steps using both closed loop and open loop forecasting.
Prerequisites
Xilinx® Zynq® Ultrascale+™ ZCU102 SoC development kit
Load the Pretrained Network
To load the LSTM network enter:
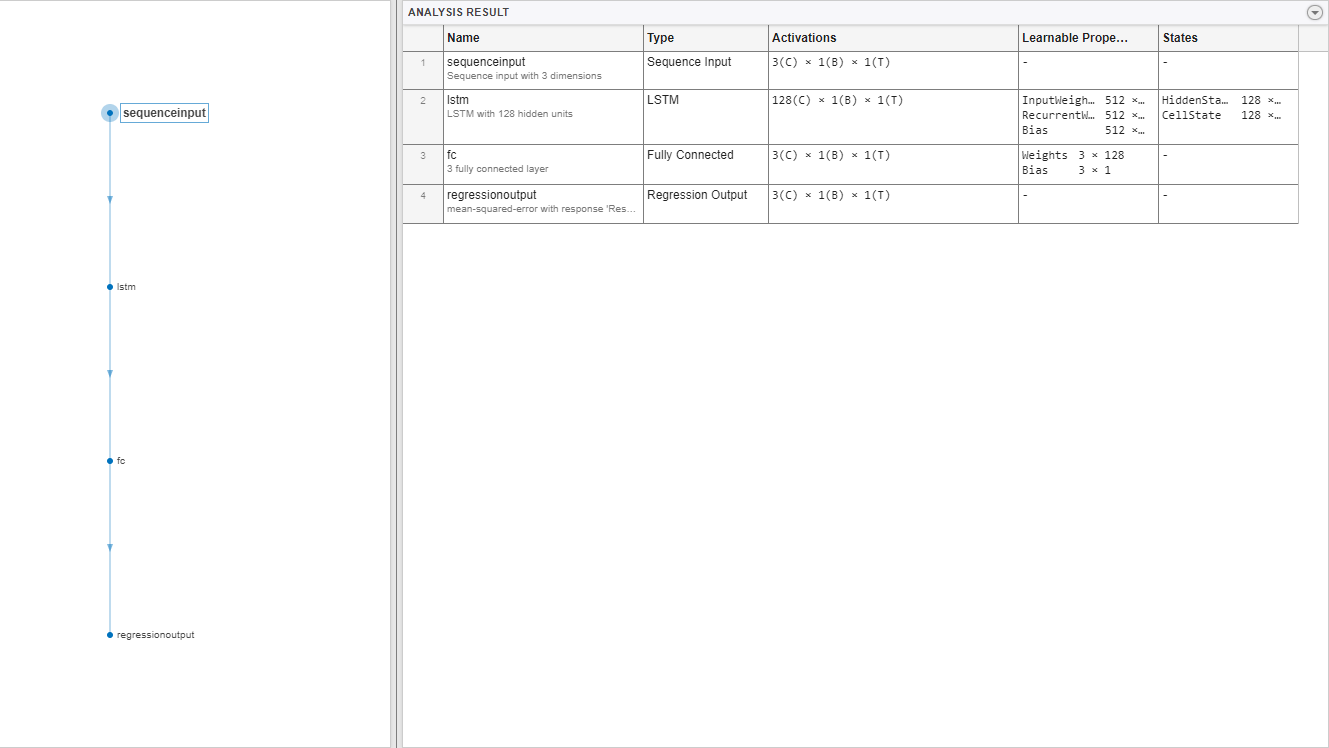
load WaveformForcastingNetUse the analyzeNetwork function to obtain information about the network layers. The function returns a graphical representation of the network that contains detailed parameter information for every layer in the network.
analyzeNetwork(net)
Define FPGA Board Interface
Define the target FPGA board programming interface by using the dlhdl.Target object. Specify that the interface is for a Xilinx board with an Ethernet interface.
To create the target object, enter:
hTarget = dlhdl.Target('Xilinx','Interface','Ethernet');
To use the JTAG interface, install Xilinx™ Vivado™ Design Suite 2024.1. To set the Xilinx Vivado toolpath, enter:
hdlsetuptoolpath('ToolName', 'Xilinx Vivado', 'ToolPath', 'C:\Xilinx\Vivado\2024.1\bin\vivado.bat'); hTarget = dlhdl.Target('Xilinx','Interface','JTAG');
Prepare Network for Deployment
Prepare the network for deployment by creating a dlhdl.Workflow object. Specify the network and the bitstream name. Ensure that the bitstream name matches the data type and the FPGA board. In this example the target FPGA board is the Xilinx ZCU102 SOC board. The bitstream uses the single data type.
hW = dlhdl.Workflow('network', net, 'Bitstream', 'zcu102_lstm_single','Target',hTarget);
Tu run the example on the Xilinx ZC706 board, enter:
hW = dlhdl.Workflow('Network', net, 'Bitstream', 'zc706_lstm_single','Target',hTarget);
Compile the LSTM Network
Run the compile method of the dlhdl.Workflow object to compile the network and generate the instructions, weights, and biases for deployment. The total number of frames exceeds the default value of 30. Set the InputFrameNumberLimit name-value argument to 1000 to run predictions in chunks of 1000 frames to prevent timeouts.
dn = compile(hW,'InputFrameNumberLimit',1000)### Compiling network for Deep Learning FPGA prototyping ...
### Targeting FPGA bitstream zcu102_lstm_single.
### An output layer called 'Output1_fc' of type 'nnet.cnn.layer.RegressionOutputLayer' has been added to the provided network. This layer performs no operation during prediction and thus does not affect the output of the network.
### The network includes the following layers:
1 'sequenceinput' Sequence Input Sequence input with 3 channels (SW Layer)
2 'lstm' LSTM LSTM with 128 hidden units (HW Layer)
3 'fc' Fully Connected Fully connected layer with output size 3 (HW Layer)
### Notice: The layer 'sequenceinput' with type 'nnet.cnn.layer.ImageInputLayer' is implemented in software.
### Compiling layer group: lstm.wi ...
### Compiling layer group: lstm.wi ... complete.
### Compiling layer group: lstm.wo ...
### Compiling layer group: lstm.wo ... complete.
### Compiling layer group: lstm.wg ...
### Compiling layer group: lstm.wg ... complete.
### Compiling layer group: lstm.wf ...
### Compiling layer group: lstm.wf ... complete.
### Compiling layer group: fc ...
### Compiling layer group: fc ... complete.
### Allocating external memory buffers:
offset_name offset_address allocated_space
_______________________ ______________ __________________
"InputDataOffset" "0x00000000" "16.0 kB"
"OutputResultOffset" "0x00004000" "16.0 kB"
"SchedulerDataOffset" "0x00008000" "868.0 kB"
"SystemBufferOffset" "0x000e1000" "20.0 kB"
"InstructionDataOffset" "0x000e6000" "4.0 kB"
"FCWeightDataOffset" "0x000e7000" "272.0 kB"
"EndOffset" "0x0012b000" "Total: 1196.0 kB"
### Network compilation complete.
dn = struct with fields:
weights: [1×1 struct]
instructions: [1×1 struct]
registers: [1×1 struct]
syncInstructions: [1×1 struct]
constantData: {}
ddrInfo: [1×1 struct]
resourceTable: [6×2 table]
Program Bitstream onto FPGA and Download Network Weights
To deploy the network on the Xilinx ZCU102 SoC hardware, run the deploy function of the dlhdl.Workflow object. This function uses the output of the compile function to program the FPGA board by using the programming file. It also downloads the network weights and biases. The deploy function starts programming the FPGA device and displays progress messages, and the required time to deploy the network.
deploy(hW)
### FPGA bitstream programming has been skipped as the same bitstream is already loaded on the target FPGA. ### Deep learning network programming has been skipped as the same network is already loaded on the target FPGA.
Test Network
Prepare the test data for prediction. Normalize the test data using the statistics calculated from the training data. To forecast the values of future time steps of a sequence, specify the targets as the test sequences with values shifted by one time step. In other words, at each time step of the input sequence, the LSTM network learns to predict the value of the next time step. Specify the predictors as the test sequences without the final time step.
load WaveformData.mat data = cellfun(@(x)x',data,UniformOutput=false); numChannels = size(data{1},1); numObservations = numel(data); idxTrain = 1:floor(0.9*numObservations); idxTest = floor(0.9*numObservations)+1:numObservations; dataTrain = data(idxTrain); dataTest = data(idxTest); for n = 1:numel(dataTrain) X = dataTrain{n}; XTrain{n} = X(:,1:end-1); TTrain{n} = X(:,2:end); end muX = mean(cat(2,XTrain{:}),2); sigmaX = std(cat(2,XTrain{:}),0,2); muT = mean(cat(2,TTrain{:}),2); sigmaT = std(cat(2,TTrain{:}),0,2); for n = 1:size(dataTest,1) X = dataTest{n}; XTest{n} = ((X(:,1:end-1) - muX) ./ sigmaX)'; TTest{n} = ((X(:,2:end) - muT) ./ sigmaT)'; end
Make predictions using the test data.
YTest = hW.predict(XTest{1},Profile ='on');### Resetting network state.
### Finished writing input activations.
### Running a sequence of length 115.
Deep Learning Processor Profiler Performance Results
LastFrameLatency(cycles) LastFrameLatency(seconds) FramesNum Total Latency Frames/s
------------- ------------- --------- --------- ---------
Network 37304 0.00015 115 4317203 6659.4
memSeparator_2 276 0.00000
memSeparator_0 167 0.00000
lstm.wi 8320 0.00003
lstm.wo 8275 0.00003
lstm.wg 8330 0.00003
lstm.wf 8285 0.00003
lstm.sigmoid_1 288 0.00000
lstm.sigmoid_3 287 0.00000
lstm.tanh_1 305 0.00000
lstm.sigmoid_2 289 0.00000
lstm.multiplication_1 390 0.00000
lstm.multiplication_2 341 0.00000
lstm.c_add 331 0.00000
lstm.tanh_2 298 0.00000
lstm.multiplication_3 328 0.00000
fc 559 0.00000
memSeparator_1 235 0.00000
* The clock frequency of the DL processor is: 250MHz
To evaluate the accuracy, calculate the root mean squared error (RMSE) between the predictions and the target for each test sequence.
for i = 1:size(YTest,2) rmse(i) = sqrt(mean((YTest(1,i) - TTest{1}(1,i)).^2,"all")); end
Visualize the errors in a histogram. Lower values indicate greater accuracy.
figure histogram(rmse) xlabel("RMSE") ylabel("Frequency")
Calculate the mean RMSE over all test observations.
mean(rmse)
ans = single
0.8385
Forecast Future Time Steps
To forecast the values of multiple future time steps, when given an input time series or sequence, use the predict function. This function predicts time steps one at a time and updates the network state at each prediction. For each prediction, use the previous prediction as the input to the function.
Visualize one of the test sequences in a plot.
idx = 2;
X = XTest{idx};
T = TTest{idx};
figure
stackedplot(X,DisplayLabels="Channel " + (1:numChannels))
xlabel("Time Step")
title("Test Observation " + idx)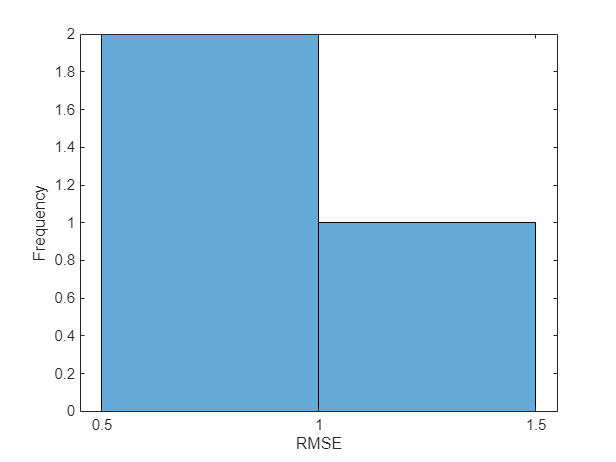
Open-Loop Forecasting
Open-loop forecasting predicts the next time step in a sequence using only the input data. When making predictions for subsequent time steps, you collect the true values form your data source and use those as input. For example, suppose that you want to predict the value for time step of a sequence by using data collected in time steps 1 through . To make predictions for time step , wait until you record the true value for time step and use that value as input to make the next prediction. Use open-loop forecasting when you have true values to provide to the network before making the next prediction.
Initialize the network state by resetting the state using the resetState function, then make an initial prediction using the first few time steps of the input data. Update the network state by using the first 75 time steps of the input data.
resetState(hW)
offset = 75;
[~,~] = hW.predict(X(1:offset,:),KeepState=true,Profile='on'); ### Resetting network state.
### Finished writing input activations.
### Running a sequence of length 75.
Deep Learning Processor Profiler Performance Results
LastFrameLatency(cycles) LastFrameLatency(seconds) FramesNum Total Latency Frames/s
------------- ------------- --------- --------- ---------
Network 37253 0.00015 75 2815915 6658.6
memSeparator_2 238 0.00000
memSeparator_0 166 0.00000
lstm.wi 8330 0.00003
lstm.wo 8283 0.00003
lstm.wg 8281 0.00003
lstm.wf 8284 0.00003
lstm.sigmoid_1 288 0.00000
lstm.sigmoid_3 366 0.00000
lstm.tanh_1 306 0.00000
lstm.sigmoid_2 290 0.00000
lstm.multiplication_1 324 0.00000
lstm.multiplication_2 342 0.00000
lstm.c_add 331 0.00000
lstm.tanh_2 372 0.00000
lstm.multiplication_3 327 0.00000
fc 491 0.00000
memSeparator_1 234 0.00000
* The clock frequency of the DL processor is: 250MHz
To forecast further predictions, loop over time steps and update the network state by using the predict function and setting the KeepState name-value argument to true. Forecast values for the remaining time steps of the test observation by looping over the time steps of the input data and using them as input to the network. The first prediction is the value that corresponds to the time step offset + 1.
numTimeSteps = size(X,1);
numPredictionTimeSteps = numTimeSteps - offset;
Y = hW.predict(X(offset+1:offset+numPredictionTimeSteps,:),KeepState=true,Profile='on');### Finished writing input activations.
### Running a sequence of length 116.
Deep Learning Processor Profiler Performance Results
LastFrameLatency(cycles) LastFrameLatency(seconds) FramesNum Total Latency Frames/s
------------- ------------- --------- --------- ---------
Network 37148 0.00015 116 4354341 6660.0
memSeparator_2 237 0.00000
memSeparator_0 167 0.00000
lstm.wi 8306 0.00003
lstm.wo 8277 0.00003
lstm.wg 8284 0.00003
lstm.wf 8290 0.00003
lstm.sigmoid_1 293 0.00000
lstm.sigmoid_3 287 0.00000
lstm.tanh_1 305 0.00000
lstm.sigmoid_2 289 0.00000
lstm.multiplication_1 324 0.00000
lstm.multiplication_2 407 0.00000
lstm.c_add 331 0.00000
lstm.tanh_2 298 0.00000
lstm.multiplication_3 327 0.00000
fc 491 0.00000
memSeparator_1 235 0.00000
* The clock frequency of the DL processor is: 250MHz
Compare the predictions with the target values.
figure t = tiledlayout(numChannels,1); title(t,"Open Loop Forecasting with LSTM layer") for i = 1:numChannels nexttile plot(T(:,i)) hold on plot(offset:numTimeSteps,[T(offset, i) Y(:, i)'],'--') ylabel("Channel " + i) end xlabel("Time Step") nexttile(1) legend(["Input" "Forecasted"])

Closed-Loop Forecasting
Closed-loop forecasting predicts subsequent time steps in a sequence by using the previous predictions as input. In this case, the model does not require the true values to make the prediction. For example, suppose that you want to predict the value for time steps through of the sequence by using data collected in time steps 1 through . To make predictions for time step , use the predicted value for time step as input. Use closed-loop forecasting to forecast multiple subsequent time steps or when you do not have true values to provide to the network before making the next prediction.
Initialize the network state by resetting the state using the resetState function, then make an initial prediction, Z, using the first few time steps of the input data. Update the network state by using the first 75 time steps of the input data.
resetState(hW)
[Z, ~] = predict(hW,X,KeepState=true,Profile='on');### Resetting network state.
### Finished writing input activations.
### Running a sequence of length 191.
Deep Learning Processor Profiler Performance Results
LastFrameLatency(cycles) LastFrameLatency(seconds) FramesNum Total Latency Frames/s
------------- ------------- --------- --------- ---------
Network 37145 0.00015 191 7169387 6660.3
memSeparator_2 237 0.00000
memSeparator_0 167 0.00000
lstm.wi 8314 0.00003
lstm.wo 8282 0.00003
lstm.wg 8281 0.00003
lstm.wf 8282 0.00003
lstm.sigmoid_1 290 0.00000
lstm.sigmoid_3 288 0.00000
lstm.tanh_1 305 0.00000
lstm.sigmoid_2 289 0.00000
lstm.multiplication_1 324 0.00000
lstm.multiplication_2 404 0.00000
lstm.c_add 330 0.00000
lstm.tanh_2 298 0.00000
lstm.multiplication_3 328 0.00000
fc 491 0.00000
memSeparator_1 235 0.00000
* The clock frequency of the DL processor is: 250MHz
To forecast further predictions, loop over time steps and update the network state by using the predict function and setting the KeepState name-value argument to true. Forecast the next 200 time steps by iteratively passing the previously predicted value to the network. Because the network does not require the input data to make any further predictions, you can specify any number of time steps to forecast.
numPredictionTimeSteps = 200; % Z = Z'; Xt = Z(end,:); Y = zeros(numPredictionTimeSteps, numChannels); fprintf("Run %d predictions:\n",numPredictionTimeSteps);
Run 200 predictions:
for t = 1:numPredictionTimeSteps fprintf("."); [Y(t,:),~] = predict(hW,Xt,KeepState=true); Xt = Y(t,:); end
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
.
### Finished writing input activations. ### Running a sequence of length 1.
Visualize the forecasted values in a plot.
offset = size(X,1); numTimeSteps = offset + numPredictionTimeSteps; figure t = tiledlayout(numChannels,1); title(t,"Closed Loop Forecasting with LSTM layer") for i = 1:numChannels nexttile plot(T(1:offset, i)) hold on plot(offset:numTimeSteps,[T(offset, i) Y(:, i)'],'--') ylabel("Channel " + i) end xlabel("Time Step") nexttile(1) legend(["Input" "Forecasted"])

Closed-loop forecasting allows you to forecast an arbitrary number of time steps, but can be less accurate when compared to open-loop forecasting because the network does not have access to the true values during the forecasting process.
Version History
Introduced in R2022bSee Also
activations | compile | deploy | predict | resetState