Trajectory
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
The Trajectory object
creates a trajectory using timestamps and waypoints.
Creation
Syntax
Description
trajectory = scenariobuilder.Trajectory(timestamps,x,y,z)trajectory, using the specified timestamps
timestamps and the corresponding xyz-coordinates
of waypoints. x, y, and z
specify the first, second, and third columns of the Position property,
respectively.
trajectory = scenariobuilder.Trajectory(timestamps,waypoints)trajectory, using the specified timestamps
timestamps and the corresponding waypoints
waypoints. The waypoints argument specifies
the Position property.
trajectory = scenariobuilder.Trajectory(___,Name=Value)Attributes=attributes specifies the optional trajectory attributes
attributes.
Input Arguments
Name-Value Arguments
Properties
Object Functions
add | Add waypoints to trajectory object |
remove | Remove data from sensor data object |
read | Read data from sensor data object |
copy | Create copy of sensor data object |
crop | Crop data from sensor data object |
synchronize | Synchronize sensor data with reference sensor information |
plot | Plot trajectory data |
writeCSV | Write trajectory data into CSV file |
distance | Compute total traveled distance of trajectory data |
normalizeTimestamps | Normalize timestamps of sensor data object |
smooth | Smooth trajectory data |
exportToDrivingScenario | Export trajectory to driving scenario |
exportToRoadRunner | Export trajectory to RoadRunner |
adjustHeight | Adjust height of waypoints in trajectory object to match road height |
convertTimestamps | Convert timestamp format of sensor data object |
Examples
Load recorded GPS trajectory data into the workspace.
load("recordedGPSData.mat","X","Y","Z","timestamps")
Create a trajectory object by using the loaded timestamps and xyz-coordinates.
traj1 = scenariobuilder.Trajectory(timestamps,X,Y,Z)
traj1 =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
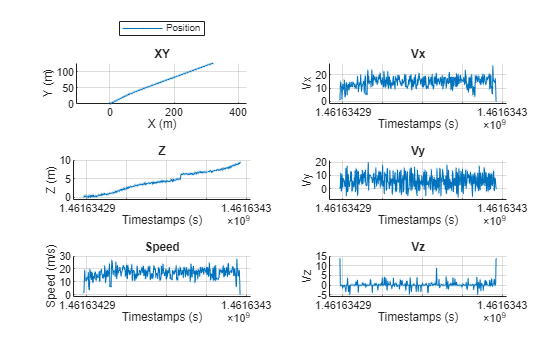
Plot the trajectory object.
plot(traj1,ShowZ=true,ShowSpeed=true,ShowVelocity=true,LineWidth=0.1,MarkerSize=1)
Combine the xyz-coordinates into a waypoint matrix, and create another trajectory by using the timestamps and waypoints.
waypoints = [X Y Z]; traj2 = scenariobuilder.Trajectory(timestamps,waypoints)
traj2 =
Trajectory with properties:
Name: ''
NumSamples: 392
Duration: 19.5498
SampleRate: 20.0513
SampleTime: 0.0500
Timestamps: [392×1 double]
Position: [392×3 double]
Orientation: [392×3 double]
Velocity: [392×3 double]
Course: [392×1 double]
GroundSpeed: [392×1 double]
Acceleration: [392×3 double]
AngularVelocity: [392×3 double]
LocalOrigin: [0 0 0]
TimeOrigin: 0
Attributes: []
Plot the trajectory object.
plot(traj2,ShowHeading=true,ShowOrientation=true,LineWidth=0.1,MarkerSize=1)
