Vision Detection Generator
Detect objects and lanes from visual measurements in a driving scenario or RoadRunner Scenario
Libraries:
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Description
The Vision Detection Generator block generates detections from camera measurements taken by a vision sensor mounted on an ego vehicle.
The block derives detections from simulated actor poses and generates these detections at intervals equal to the sensor update interval. By default, detections are referenced to the coordinate system of the ego vehicle. The block can simulate real detections with added random noise and also generate false positive detections. A statistical model generates the measurement noise, true detections, and false positives. To control the random numbers that the statistical model generates, use the random number generator settings on the Measurements tab of the block.
You can use the block with vehicle actors in Driving Scenario and RoadRunner Scenario simulations. For more information, see Add Sensors to RoadRunner Scenario Using Simulink example.
You can use the Vision Detection Generator to create input to a Multi-Object Tracker block. When building scenarios and sensor models using the Driving Scenario Designer app, the camera sensors exported to Simulink® are output as Vision Detection Generator blocks.
Examples
Sensor Fusion Using Synthetic Radar and Vision Data in Simulink
Implement a synthetic data simulation for tracking and sensor fusion in Simulink with Automated Driving Toolbox™.
Adaptive Cruise Control with Sensor Fusion
Implement an automotive adaptive cruise controller using sensor fusion.
Lane Following Control with Sensor Fusion and Lane Detection
Simulate and generate code for an automotive lane-following controller.
Generate Sensor Blocks Using Driving Scenario Designer
Generate Simulink blocks for a driving scenario and sensors that were built using the Driving Scenario Designer app.
Test Open-Loop ADAS Algorithm Using Driving Scenario
Test open-loop ADAS algorithms in Simulink by using driving scenarios saved from the Driving Scenario Designer app.
Test Closed-Loop ADAS Algorithm Using Driving Scenario
Test closed-loop ADAS algorithms in Simulink by using driving scenarios saved from the Driving Scenario Designer app.
Add Sensors to RoadRunner Scenario Using Simulink
Simulate a RoadRunner Scenario with sensor models defined in Simulink and visualize object and lane detections.
Ports
Input
Scenario actor poses in ego vehicle coordinates, specified as a Simulink bus containing a MATLAB structure.
The structure must contain these fields.
| Field | Description | Type |
|---|---|---|
NumActors | Number of actors | Nonnegative integer |
Time | Current simulation time | Real-valued scalar |
Actors | Actor poses | NumActors-length array of actor pose structures |
Each actor pose structure in Actors must have these
fields.
| Field | Description |
|---|---|
ActorID | Scenario-defined actor identifier, specified as a positive integer. |
Position | Position of actor, specified as a real-valued vector of the form [x y z]. Units are in meters. |
Velocity | Velocity (v) of actor in the x- y-, and z-directions, specified as a real-valued vector of the form [vx vy vz]. Units are in meters per second. |
Roll | Roll angle of actor, specified as a real-valued scalar. Units are in degrees. |
Pitch | Pitch angle of actor, specified as a real-valued scalar. Units are in degrees. |
Yaw | Yaw angle of actor, specified as a real-valued scalar. Units are in degrees. |
AngularVelocity | Angular velocity (ω) of actor in the x-, y-, and z-directions, specified as a real-valued vector of the form [ωx ωy ωz]. Units are in degrees per second. |
Dependencies
To enable this input port, set the Types of detections
generated by sensor parameter to Objects
only, Lanes with
occlusion, or Lanes and
objects.
Lane boundaries in ego vehicle coordinates, specified as a Simulink bus containing a MATLAB structure.
The structure must contain these fields.
| Field | Description | Type |
|---|---|---|
NumLaneBoundaries | Number of lane boundaries | Nonnegative integer |
Time | Current simulation time | Real scalar |
LaneBoundaries | Lane boundaries starting from the leftmost lane with respect to the ego vehicle. | NumLaneBoundaries-length array of lane boundary structures |
Each lane boundary structure in LaneBoundaries must
have these fields.
| Field | Description |
| Lane boundary coordinates, specified as a real-valued N-by-3 matrix, where N is the number of lane boundary coordinates. Lane boundary coordinates define the position of points on the boundary at specified longitudinal distances away from the ego vehicle, along the center of the road.
This matrix also includes the boundary coordinates at zero distance from the ego vehicle. These coordinates are to the left and right of the ego-vehicle origin, which is located under the center of the rear axle. Units are in meters. |
| Lane boundary curvature at each row of the Coordinates matrix, specified
as a real-valued N-by-1 vector. N is the
number of lane boundary coordinates. Units are in radians per meter. |
| Derivative of lane boundary curvature at each row of the Coordinates
matrix, specified as a real-valued N-by-1 vector.
N is the number of lane boundary coordinates. Units are
in radians per square meter. |
| Initial lane boundary heading angle, specified as a real scalar. The heading angle of the lane boundary is relative to the ego vehicle heading. Units are in degrees. |
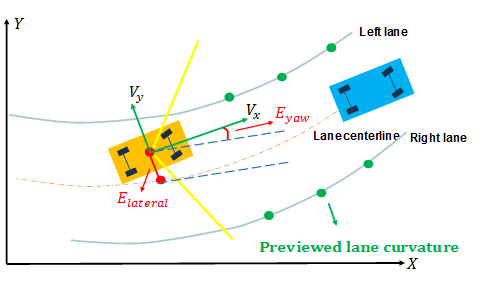
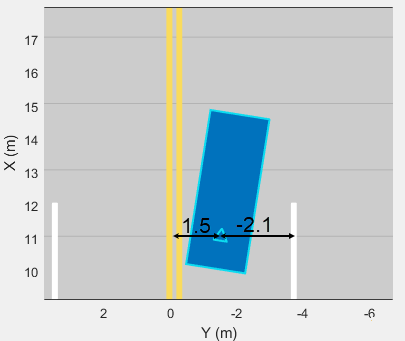
| Lateral offset of the ego vehicle position from the lane boundary, specified as a real scalar. An offset to a lane boundary to the left of the ego vehicle is positive. An offset to the right of the ego vehicle is negative. Units are in meters. In this image, the ego vehicle is offset 1.5 meters from the left lane and 2.1 meters from the right lane.
|
| Type of lane boundary marking, specified as one of these values:
|
| Saturation strength of the lane boundary marking, specified as a real scalar from 0 to
1. A value of |
| Lane boundary width, specified as a positive real scalar. In a double-line lane marker, the same width is used for both lines and for the space between lines. Units are in meters. |
| Length of dash in dashed lines, specified as a positive real scalar. In a double-line lane marker, the same length is used for both lines. |
| Length of space between dashes in dashed lines, specified as a positive real scalar. In a dashed double-line lane marker, the same space is used for both lines. |
Dependencies
To enable this input port, set the Types of detections
generated by sensor parameter to Lanes
only, Lanes only,
Lanes with occlusion, or
Lanes and objects.
Output
Parameters
Algorithms
The vision sensor models a monocular camera that produces 2-D camera images. To project the coordinates of these 2-D images into the 3-D world coordinates used in driving scenarios, the sensor algorithm assumes that the z-position (height) of all image points of the bottom edge of the target’s image bounding box lie on the ground. The plane defining the ground is defined by the height property of the vision detection generator, which defines the offset of the monocular camera above the ground plane. With this projection, the vertical locations of objects in the produced images are strongly correlated to their heights above the road. However, if the road is not flat and the heights of objects differ from the height of the sensor, then the sensor reports inaccurate detections. For an example that shows this behavior, see Model Vision Sensor Detections.
Extended Capabilities
Version History
Introduced in R2017bSee Also
Apps
Blocks
- Driving Radar Data Generator | Detection Concatenation | Multi-Object Tracker | Scenario Reader | Lidar Point Cloud Generator | Simulation 3D Vision Detection Generator
Objects
Topics
- Create Nonvirtual Buses (Simulink)