cameraIntrinsics
Object for storing intrinsic camera parameters
Description
Store information about a camera’s intrinsic calibration parameters, including lens distortion.
Creation
Syntax
Description
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize)
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize,PropertyName=Value)RadialDistortion=[0 10]
sets the radial lens distortion property, to the vector [0
10].
Properties
Focal length in x and y, stored as a 2-element vector [fx fy] in pixels.
fx = F * sx
fy = F * sy
F is the focal length in world units, typically in millimeters. sx and sy are the number of pixels per world unit in the x and y direction respectively. Thus, fx and fy are in pixels.
The focal length F influences the angle of view and thus affects the area of the scene that appears focused in an image. For a fixed subject distance:
A short focal length offers a wide angle of view allowing to capture large area of the scene under focus. It emphasizes both the subject and the scene background.
A long focal length offers a narrow angle of view, thus reducing the area of the scene under focus. It emphasizes more on the subject and restricts the amount of background from being captured.
You cannot set the value of FocalLength after you create the
cameraIntrinsics object.
Optical center of camera, stored as a two-element vector [cx cy] in pixels. The vector contains the coordinates of the optical center of the camera.
You cannot set the value of PrincipalPoint after you create the
cameraIntrinsics object.
Image size produced by the camera, stored as a two-element vector, [mrows ncols].
You cannot set the value of ImageSize after you create the
cameraIntrinsics object.
Radial lens distortion coefficients, specified as a 2-, 3-, or 6-element vector.
2-element vector — [k1 k2].
3-element vector — [k1 k2 k3].
6-element vector — [k1 k2 k3 k4 k5 k6].
In the Robot Operating System (ROS), the 3-element vector is referred to as the plumb_bob model, while the 6-element vector is known as the rational_polynomial model.
Radial distortion is the displacement of image points along radial lines extending from the principal point.
As image points move away from the principal point (positive radial displacement), image magnification decreases and a pincushion-shaped distortion occurs on the image.
As image points move toward the principal point (negative radial displacement), image magnification increases and a barrel-shaped distortion occurs on the image.

The camera parameters object calculates the radial-distorted location of a point, denoted as (xdistorted, ydistorted):
| x, y is a undistorted image point in normalized image coordinates in world units, with the origin at the optical center. |
| r2 = x2 + y2 |
| k1, k2, …, k6 are radial distortion coefficients of the lens. Typically, two coefficients are sufficient and k3, …, k6 are only needed for wide-angle lenses. |
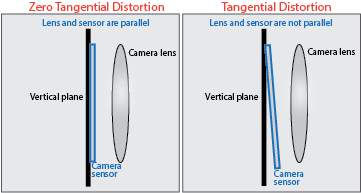
Tangential distortion coefficients, specified as a 2-element vector, [p1 p2]. Tangential distortion occurs when the lens and the image plane are not parallel.
The camera parameters object calculates the tangential distorted location of a point. You can denote the distorted points as (xdistorted, ydistorted), as follows:
xdistorted = x + [2 * p1 * x * y + p2 * (r2 + 2 * x2)]
ydistorted = y + [p1 * (r2 + 2*y2) + 2 * p2 * x * y]
| x, y are undistorted pixel locations |
| p1 and p2 are tangential distortion coefficients of the lens |
| r2 = x2 + y2 |
Camera axes skew, specified as a numeric scalar. If the x and the
y axes are exactly perpendicular, then the skew must be
0.
This property is read-only.
Camera intrinsic matrix, specified as a 3-by-3 matrix. The matrix has the format
The coordinates [cx
cy] represent the optical center (the
principal point), in pixels. When the x and y axis
are exactly perpendicular, the skew parameter, s, equals
0.
fx = F*sx
fy = F*sy
| F is the focal length in world units, typically expressed in millimeters. |
| sx and sy are the number of pixels per world unit in the x and y direction respectively. |
| fx and fy are expressed in pixels. |