interpolate
Brownian interpolation of stochastic differential equations (SDEs) for
SDE, BM, GBM,
CEV, CIR, HWV,
Heston, SDEDDO, SDELD, or
SDEMRD models
Description
Examples
Many applications require knowledge of the state vector at intermediate sample times that are initially unavailable. One way to approximate these intermediate states is to perform a deterministic interpolation. However, deterministic interpolation techniques fail to capture the correct probability distribution at these intermediate times. Brownian (or stochastic) interpolation captures the correct joint distribution by sampling from a conditional Gaussian distribution. This sampling technique is sometimes referred to as a Brownian Bridge.
The default stochastic interpolation technique is designed to interpolate into an existing time series and ignore new interpolated states as additional information becomes available. This technique is the usual notion of interpolation, which is called Interpolation without refinement.
Alternatively, the interpolation technique may insert new interpolated states into the existing time series upon which subsequent interpolation is based, by that means refining information available at subsequent interpolation times. This technique is called interpolation with refinement.
Interpolation without refinement is a more traditional technique, and is most useful when the input series is closely spaced in time. In this situation, interpolation without refinement is a good technique for inferring data in the presence of missing information, but is inappropriate for extrapolation. Interpolation with refinement is more suitable when the input series is widely spaced in time, and is useful for extrapolation.
The stochastic interpolation method is available to any model. It is best illustrated, however, by way of a constant-parameter Brownian motion process. Consider a correlated, bivariate Brownian motion (BM) model of the form:
Specify BM Model
Create a bm object to represent the bivariate model.
mu = [0.3; 0.4];
sigma = [0.2 -0.1; 0.1 -0.2];
rho = [1 0.5; 0.5 1];
obj = bm(mu,sigma,'Correlation',rho);Simulate Single Path from BM
Assuming that the drift (Mu) and diffusion (Sigma) parameters are annualized, simulate a single Monte Carlo trial of daily observations for one calendar year (250 trading days).
rng default % Make output reproducible dt = 1/250; % 1 trading day = 1/250 years [X,T] = simulate(obj,250,'DeltaTime',dt);
Interpolate Into Simulated Time Series
Interpolate into the simulated time series with a Brownian bridge.
t = ((T(1) + dt/2):(dt/2):(T(end) - dt/2));
x = interpolate(obj,t,X,'Times',T);Plot Simulated and Interpolated Values
Plot both the simulated and interpolated values.
plot(T,X(:,1),'.-r',T,X(:,2),'.-b') grid on; hold on; plot(t,x(:,1),'or',t,x(:,2),'ob') hold off; xlabel('Time (Years)') ylabel('State') title('Bi-Variate Brownian Motion: \rho = 0.5') axis([0.4999 0.6001 0.25 0.4])
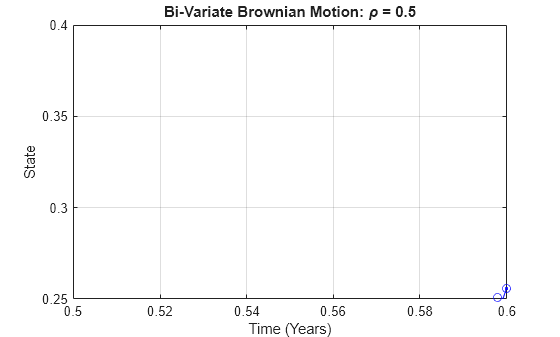
In this plot:
The solid red and blue dots indicate the simulated states of the bivariate model.
The straight lines that connect the solid dots indicate intermediate states that would be obtained from a deterministic linear interpolation.
Open circles indicate interpolated states.
Open circles associated with every other interpolated state encircle solid dots associated with the corresponding simulated state. However, interpolated states at the midpoint of each time increment typically deviate from the straight line connecting each solid dot.
You can gain additional insight into the behavior of stochastic interpolation by regarding a Brownian bridge as a Monte Carlo simulation of a conditional Gaussian distribution. This example examines the behavior of a Brownian bridge over a single time increment.
Create Subintervals
Divide a single time increment of length dt into 10 subintervals.
mu = [0.3; 0.4]; sigma = [0.2 -0.1; 0.1 -0.2]; rho = [1 0.5; 0.5 1]; obj = bm(mu,sigma,'Correlation',rho); rng default; % make output reproducible dt = 1/250; % 1 trading day = 1/250 years [X,T] = simulate(obj,250,'DeltaTime',dt); n = 125; % index of simulated state near middle times = (T(n):(dt/10):T(n + 1)); nTrials = 25000; % # of Trials at each time
Draw Random Gaussian Numbers Within Subintervals
In each subinterval, take 25000 independent draws from a Gaussian distribution, conditioned on the simulated states to the left, and right.
average = zeros(length(times),1); variance = zeros(length(times),1); for i = 1:length(times) t = times(i); x = interpolate(obj,t(ones(nTrials,1)),... X,'Times',T); average(i) = mean(x(:,1)); variance(i) = var(x(:,1)); end
Plot State Mean and Variance
Plot the sample mean and variance of each state variable. The following graph plots the sample statistics of the first state variable only, but similar results hold for any state variable.
subplot(2,1,1); hold on; grid on; plot([T(n) T(n + 1)],[X(n,1) X(n + 1,1)],'.-b') plot(times, average, 'or') hold off; title('Brownian Bridge without Refinement: Sample Mean') ylabel('Mean') limits = axis; axis([T(n) T(n + 1) limits(3:4)]); subplot(2,1,2) hold on; grid on; plot(T(n),0,'.-b',T(n + 1),0,'.-b') plot(times, variance, '.-r') hold('off'); title('Brownian Bridge without Refinement: Sample Variance') xlabel('Time (Years)') ylabel('Variance') limits = axis; axis([T(n) T(n + 1) limits(3:4)]);

The Brownian interpolation within the chosen interval, dt, illustrates the following:
The conditional mean of each state variable lies on a straight-line segment between the original simulated states at each endpoint.
The conditional variance of each state variable is a quadratic function. This function attains its maximum midway between the interval endpoints, and is zero at each endpoint.
The maximum variance, although dependent upon the actual model diffusion-rate function G(t,X), is the variance of the sum of
NBrownscorrelated Gaussian variates scaled by the factor dt/4.
The previous plot highlights interpolation without refinement, in that none of the interpolated states take into account new information as it becomes available. If you had performed interpolation with refinement, new interpolated states would have been inserted into the time series and made available to subsequent interpolations on a trial-by-trial basis. In this case, all random draws for any given interpolation time would be identical. Also, the plot of the sample mean would exhibit greater variability, but would still cluster around the straight-line segment between the original simulated states at each endpoint. The plot of the sample variance, however, would be zero for all interpolation times, exhibiting no variability.
Input Arguments
Name-Value Arguments
Output Arguments
More About
There are inheritance relationships among the SDE classes.
The following figure illustrates the inheritance relationships.
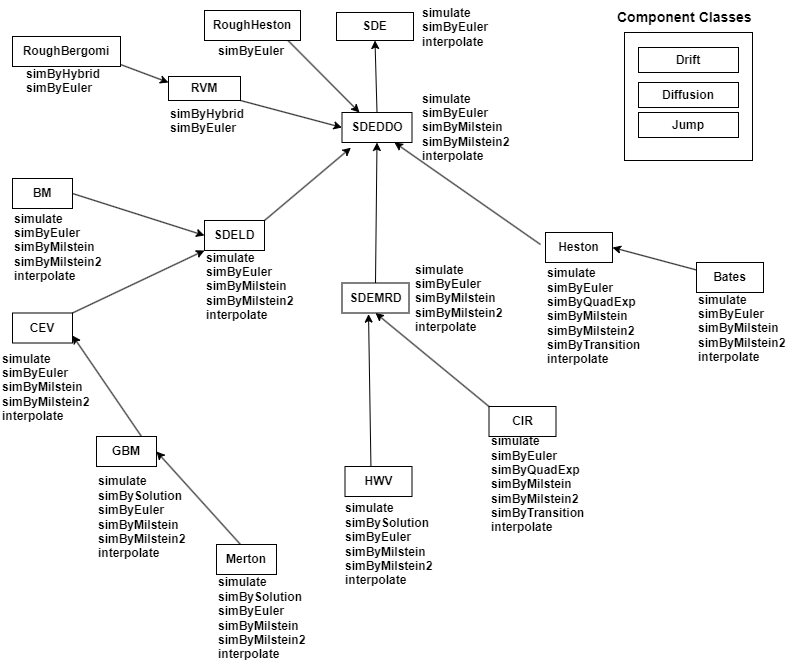
For more information, see SDE Class Hierarchy.
Algorithms
This function performs a Brownian interpolation into a user-specified time series array, based on a piecewise-constant Euler sampling approach.
Consider a vector-valued SDE of the form:
where:
X is an NVars-by-
1state vector.F is an NVars-by-
1drift-rate vector-valued function.G is an NVars-by-NBrowns diffusion-rate matrix-valued function.
W is an NBrowns-by-
1Brownian motion vector.
Given a user-specified time series array associated with this equation, this function performs a Brownian (stochastic) interpolation by sampling from a conditional Gaussian distribution. This sampling technique is sometimes called a Brownian bridge.
Note
Unlike simulation methods, the interpolation function does not
support user-specified noise processes.
The
interpolatefunction assumes that all model parameters are piecewise-constant, and evaluates them from the most recent observation time inTimesthat precedes a specified interpolation time inT. This is consistent with the Euler approach of Monte Carlo simulation.When an interpolation time falls outside the interval specified by
Times, a Euler simulation extrapolates the time series by using the nearest available observation.The user-defined time series
Pathsand corresponding observationTimesmust be fully observed (no missing observations denoted byNaNs).The
interpolatefunction assumes that the user-specified time series arrayPathsis associated with thesdeobject. For example, theTimesandPathsinput pair are the result of an initial course-grained simulation. However, the interpolation ignores the initial conditions of thesdeobject (StartTimeandStartState), allowing the user-specifiedTimesandPathsinput series to take precedence.
References
[1] Aït-Sahalia, Y. “Testing Continuous-Time Models of the Spot Interest Rate.” The Review of Financial Studies, Spring 1996, Vol. 9, No. 2, pp. 385–426.
[2] Aït-Sahalia, Y. “Transition Densities for Interest Rate and Other Nonlinear Diffusions.” The Journal of Finance, Vol. 54, No. 4, August 1999.
[3] Glasserman, P. Monte Carlo Methods in Financial Engineering. New York, Springer-Verlag, 2004.
[4] Hull, J. C. Options, Futures, and Other Derivatives, 5th ed. Englewood Cliffs, NJ: Prentice Hall, 2002.
[5] Johnson, N. L., S. Kotz, and N. Balakrishnan. Continuous Univariate Distributions. Vol. 2, 2nd ed. New York, John Wiley & Sons, 1995.
[6] Shreve, S. E. Stochastic Calculus for Finance II: Continuous-Time Models. New York: Springer-Verlag, 2004.
Version History
Introduced in R2008a