cev
Constant Elasticity of Variance (CEV) model
Description
Creates and displays a cev objects, which derives from the
sdeld (SDE with drift rate expressed in
linear form) class.
Use cev objects to simulate sample paths of
NVars state variables driven by NBrowns
Brownian motion sources of risk over NPeriods consecutive observation
periods, approximating continuous-time stochastic processes.
This model allows you to simulate any vector-valued CEV of the form:
where:
Xt is an
NVars-by-1state vector of process variables.μ is an
NVars-by-NVars(generalized) expected instantaneous rate of return matrix.D is an
NVars-by-NVarsdiagonal matrix, where each element along the main diagonal is the corresponding element of the state vector raised to the corresponding power of α.V is an
NVars-by-NBrownsinstantaneous volatility rate matrix.dWt is an
NBrowns-by-1Brownian motion vector.
Creation
Description
CEV = cev(Return,Alpha,Sigma)CEV object.
Specify the required input parameters as one of the following types:
A MATLAB® array. Specifying an array indicates a static (non-time-varying) parametric specification. This array fully captures all implementation details, which are clearly associated with a parametric form.
A MATLAB function. Specifying a function provides indirect support for virtually any static, dynamic, linear, or nonlinear model. This parameter is supported via an interface, because all implementation details are hidden and fully encapsulated by the function.
Note
You can specify combinations of array and function input parameters as needed.
Moreover, a parameter is identified as a deterministic function
of time if the function accepts a scalar time t
as its only input argument. Otherwise, a parameter is assumed to be
a function of time t and state
X(t) and is invoked with both input
arguments.
CEV = cev(___,Name,Value)CEV object with additional options specified by
one or more Name,Value pair arguments.
Name is a property name and Value is
its corresponding value. Name must appear inside single
quotes (''). You can specify several name-value pair
arguments in any order as
Name1,Value1,…,NameN,ValueN
The CEV object has the following Properties:
StartTime— Initial observation timeStartState— Initial state at timeStartTimeCorrelation— Access function for theCorrelationinput argument, callable as a function of timeDrift— Composite drift-rate function, callable as a function of time and stateDiffusion— Composite diffusion-rate function, callable as a function of time and stateSimulation— A simulation function or methodReturn— Access function for the input argumentReturn, callable as a function of time and stateAlpha— Access function for the input argumentAlpha, callable as a function of time and stateSigma— Access function for the input argumentSigma, callable as a function of time and state
Input Arguments
Output Arguments
Properties
Object Functions
interpolate | Brownian interpolation of stochastic differential equations (SDEs) for
SDE, BM, GBM,
CEV, CIR, HWV,
Heston, SDEDDO, SDELD, or
SDEMRD models |
simulate | Simulate multivariate stochastic differential equations (SDEs) for
SDE, BM, GBM,
CEV, CIR, HWV,
Heston, SDEDDO, SDELD,
SDEMRD, Merton, or Bates
models |
simByEuler | Euler simulation of stochastic differential equations (SDEs) for
SDE, BM, GBM,
CEV, CIR, HWV,
Heston, SDEDDO, SDELD, or
SDEMRD models |
simByMilstein | Simulate diagonal diffusion for BM, GBM,
CEV, HWV, SDEDDO,
SDELD, or SDEMRD sample paths by Milstein
approximation |
simByMilstein2 | Simulate BM, GBM, CEV,
HWV, SDEDDO, SDELD,
SDEMRD process sample paths by second order Milstein
approximation |
Examples
More About
There are inheritance relationships among the SDE classes.
The following figure illustrates the inheritance relationships.
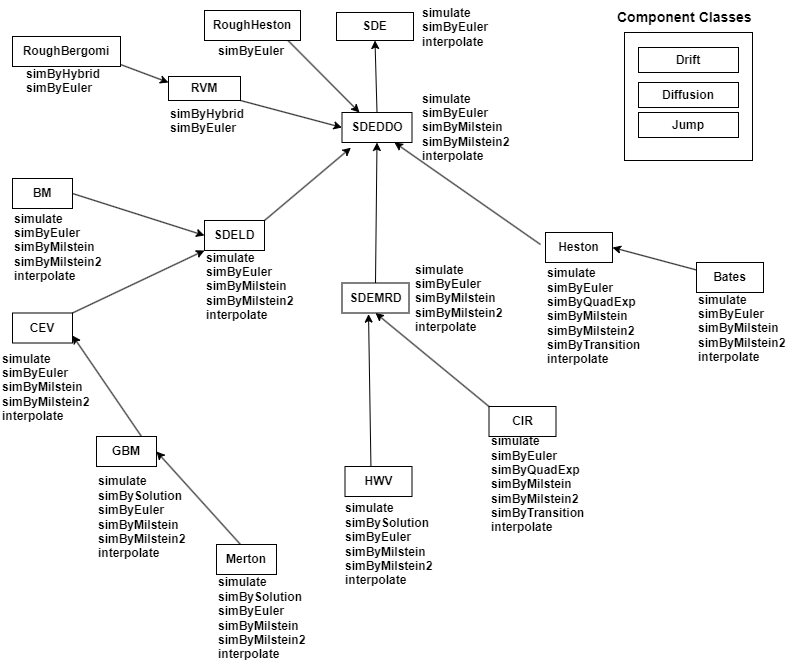
For more information, see SDE Models, SDE Classes and Associated Simulation Methods, and SDE Class Hierarchy.
Algorithms
When you specify the required input parameters as arrays, they are associated with a specific parametric form. By contrast, when you specify either required input parameter as a function, you can customize virtually any specification.
Accessing the output parameters with no inputs simply returns the original input specification. Thus, when you invoke these parameters with no inputs, they behave like simple properties and allow you to test the data type (double vs. function, or equivalently, static vs. dynamic) of the original input specification. This is useful for validating and designing methods.
When you invoke these parameters with inputs, they behave like functions, giving the
impression of dynamic behavior. The parameters accept the observation time
t and a state vector
Xt, and return an array of appropriate
dimension. Even if you originally specified an input as an array, cev
treats it as a static function of time and state, by that means guaranteeing that all
parameters are accessible by the same interface.
References
[1] Aït-Sahalia, Yacine. “Testing Continuous-Time Models of the Spot Interest Rate.” Review of Financial Studies, vol. 9, no. 2, Apr. 1996, pp. 385–426.
[2] Aït-Sahalia, Yacine. “Transition Densities for Interest Rate and Other Nonlinear Diffusions.” The Journal of Finance, vol. 54, no. 4, Aug. 1999, pp. 1361–95.
[3] Glasserman, Paul. Monte Carlo Methods in Financial Engineering. Springer, 2004.
[4] Hull, John. Options, Futures and Other Derivatives. 7th ed, Prentice Hall, 2009.
[5] Johnson, Norman Lloyd, et al. Continuous Univariate Distributions. 2nd ed, Wiley, 1994.
[6] Shreve, Steven E. Stochastic Calculus for Finance. Springer, 2004.
Version History
Introduced in R2008aSee Also
drift | diffusion | sdeld | simulate | interpolate | simByEuler | nearcorr
Topics
- Creating Constant Elasticity of Variance (CEV) Models
- Implementing Multidimensional Equity Market Models, Implementation 3: Using SDELD, CEV, and GBM Objects
- Simulating Equity Prices
- Simulating Interest Rates
- Stratified Sampling
- Price American Basket Options Using Standard Monte Carlo and Quasi-Monte Carlo Simulation
- Base SDE Models
- Drift and Diffusion Models
- Linear Drift Models
- Parametric Models
- SDEs
- SDE Models
- SDE Class Hierarchy
- Quasi-Monte Carlo Simulation
- Performance Considerations