Air Muscle Actuator (G)
Linear actuator with force characteristics of biological muscle

Libraries:
Simscape /
Fluids /
Gas /
Actuators
Description
The Air Muscle Actuator (G) block models a linear actuator popular in robotics for its characteristics reminiscent of biological muscle. The actuator comprises an expandable bladder in a braided shell. When the bladder is pressurized, the pair widens and simultaneously shortens, producing at their end caps a contractile force. The bladder is pressurized at Gas port A; the force is exerted at Mechanical Translational ports R and C.
Air Muscle in Relaxed State
Air muscles are often installed in pairs—one muscle serving as agonist, the other as antagonist. Pairs of this sort are common in the human body, where the biceps (in the arm) accompanies the triceps, and the quadriceps (in the leg) accompanies the hamstrings. The muscles attach at one end to a joint, but at an offset so as to produce a torque. When the net torque is other than zero, and if loading conditions allow, the joint rotates.
Actuator Force
The mass and energy balances of the actuator are as described for the Translational Mechanical Converter (G) block. The actuator force, however, is based on the standard Chou-Hannaford equation (with two corrections made for the simplifying assumptions of the original model). In its original form, the Chou-Hannaford equation gives:
where:
F is the contractile force exerted by the actuator on its ends. The subscript
C-Hdenotes the theoretical value of the original Chou-Hannaford model.D is the diameter of the bladder and shell assembly. The subscript
Mdenotes its maximum theoretical value—that in which the braids of the shell are at right angles to its longitudinal axis.P is the gauge pressure in the bladder (measured against the environment external to the actuator).
L is the length of the actuator (the distance between the mechanical ports R and C.
l is the natural length of a braid (before it is stretched in a pressurized bladder). The braids, as they are wound about the longitudinal axis of the actuator, are always longer than the actuator itself).
The maximum theoretical diameter of the actuator is defined as:
where n is the number of turns that a braid makes about the longitudinal axis of the actuator.
Implicit in the Chou-Hannaford equation are the assumptions of infinitely thin bladder and shell and of inelastic braids incapable of stretching. Both assumptions can lower the accuracy of the model and are corrected for in this block. The correction for the stretching in a braid replaces the constant length l with the variable length l*:
where l is the natural length of a braid used in the original Chou-Hannaford equation and:
C is a correction term for braid stretching.
E is Young's modulus of elasticity for the material of the braids.
d is the diameter of a strand in a braid (each braid being a bundle of tightly intertwined strands).
The correction term for braid stretching is defined as:
where N is the total number strands in the braided shell. The correction for the thickness of the bladder and shell adds to the total actuator force the factor:
where t is the aggregate thickness of the
bladder and shell and the subscript T denotes the correction for
thickness. The total actuator force is:
where the strand length used in the calculation of the Chou-Hannaford term is the variable l*. This force is counteracted at the limits of extension and contraction by translational hard stops. These are modeled as described for the Translational Hard Stop block.
Modeling Assumptions
There is no flow resistance between the gas entrance (port A) and the interior of the actuator.
There is no thermal resistance between the actuator wall (port H) and the gas that it encloses.
The actuator is hermetic and does not leak.
The effects of friction and inertia are ignored.
The bladder and shell are perfectly cylindrical no matter their inflation level.
The longitudinal elasticity of the bladder is ignored.
Examples
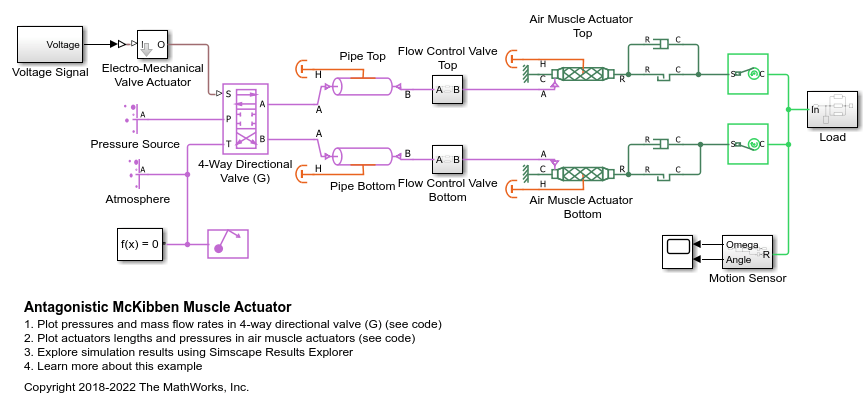
Antagonistic McKibben Muscle Actuator
This demo shows a muscle actuation based on two air muscle actuators (or McKibben artificial muscles) in antagonistic connection. The air muscle actuators are connected to the opposite sides of a lever. The 4-way directional valve is controlled by an electro-mechanical valve actuator. In the 4-way directional valve when the high-pressure path P-A and return line B-T are open, the top air muscle actuator contracts and forces the bottom air muscle actuator on the opposite side to extend. Similarly, as the high-pressure path P-B and return line A-T open, the bottom air muscle actuator starts to contract and forces the top air muscle actuator to extend. The oscillating motions of the muscles are converted into the angular rotation of the output load connected to the mechanical linkage modeled with the slider-cranks.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2018b