corner
(Not recommended) Find corner points in image
corner is not recommended. Use detectHarrisFeatures (Computer Vision Toolbox) or detectMinEigenFeatures (Computer Vision Toolbox) in Computer Vision Toolbox™ instead.
Syntax
Description
C = corner(___,Name,Value)
Examples
This example shows how to locate corners with the corner function and adjust your results by refining the maximum number of desired corners.
Create a checkerboard image.
I = checkerboard(40,2,2);
Find the corners in the image.
C = corner(I);
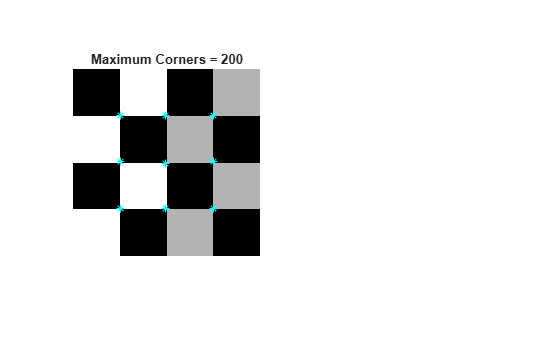
Display the corners when the maximum number of desired corners is the default setting of 200.
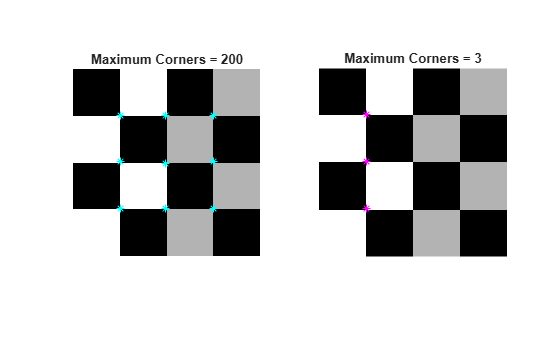
subplot(1,2,1); imshow(I); hold on plot(C(:,1), C(:,2), '*', 'Color', 'c') title('Maximum Corners = 200') hold off
Display the corners when the maximum number of desired corners is 3.
corners_max_specified = corner(I,3); subplot(1,2,2); imshow(I); hold on plot(corners_max_specified(:,1), corners_max_specified(:,2), ... '*', 'Color', 'm') title('Maximum Corners = 3') hold off
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The corner and cornermetric functions both detect corners in images. For most
applications, use the streamlined corner function to find corners in
one step. If you want greater control over corner selection, use the
cornermetric function to compute a corner metric matrix and then
write your own algorithm to find peak values.
Algorithms
The corner function performs nonmaxima suppression on candidate
corners, and corners are at least two pixels apart.
Version History
Introduced in R2010b
See Also
cornermetric | detectHarrisFeatures (Computer Vision Toolbox) | detectMinEigenFeatures (Computer Vision Toolbox)