fsamp2
2-D FIR filter using frequency sampling
Description
h = fsamp2(Hd)Hd,
and returns the filter coefficients in matrix h. The filter
h has a frequency response that passes through points in
Hd. fsamp2 designs two-dimensional FIR
filters based on a desired two-dimensional frequency response sampled at points on
the Cartesian plane.
h = fsamp2(f1,f2,Hd,[m n])m-by-n FIR filter by matching the
filter response at the points in the vectors f1 and
f2. The frequency vectors f1 and
f2 are in normalized frequency, where 1.0 corresponds to half
the sampling frequency, or π radians. The resulting filter fits the desired response
as closely as possible in the least squares sense. For best results, there must be
at least m*n desired frequency points. fsamp2
issues a warning if you specify fewer than m*n points.
Examples
Use fsamp2 to design an approximately symmetric, two-dimensional bandpass filter with passband between 0.1 and 0.5 (normalized frequency, where 1.0 corresponds to half the sampling frequency, or radians).
Create a matrix Hd that contains the desired bandpass response. Use freqspace to create the frequency vectors f1 and f2.
[f1,f2] = freqspace(21,'meshgrid');
Hd = ones(21);
r = sqrt(f1.^2 + f2.^2);
Hd((r<0.1)|(r>0.5)) = 0;
colormap(jet(64))
mesh(f1,f2,Hd)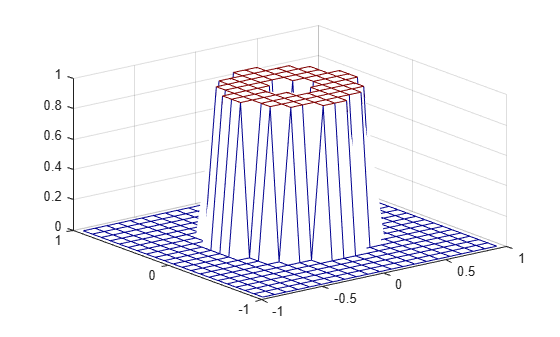
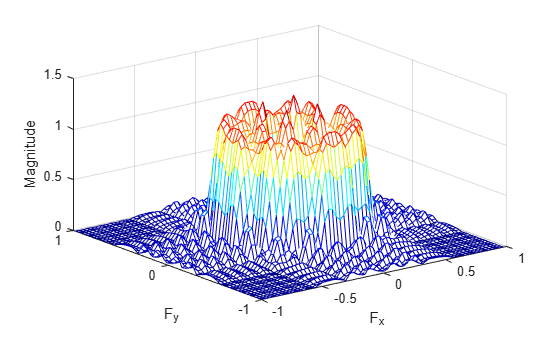
Design the filter that passes through this response.
h = fsamp2(Hd); freqz2(h)
Input Arguments
Output Arguments
Algorithms
fsamp2 computes the filter h by taking the
inverse discrete Fourier transform of the desired frequency response. If the desired
frequency response is real and symmetric (zero phase), the resulting filter is also zero
phase.
References
[1] Lim, Jae S., Two-Dimensional Signal and Image Processing, Englewood Cliffs, NJ, Prentice Hall, 1990, pp. 213-217.
Version History
Introduced before R2006a