makehgtform
Create 4-by-4 transform matrix
Syntax
Description
Identity Matrix
M = makehgtformTransform object resets its child objects to their original
orientation, position, and size.
Scaling Matrix
M = makehgtform("scale",s)Transform object.
If
sis a scalar, the transform matrix scales uniformly bysalong the x-, y-, and z-axes.If
sis a row vector[sx sy sz], the transform matrix scales along the x-axis bysx, along the y-axis bysy, and along the z-axis bysz.
Rotation Matrix
M = makehgtform("axisrotate",[rx ry rz],r)Transform object
counterclockwise around an axis [rx ry rz] by
r radians.
Translation Matrix
M = makehgtform("translate",[tx ty tz])Transform object
along the x-axis by tx units, along the
y-axis by ty units, and along the
z-axis by tz units. To avoid
translation along a particular axis, specify the corresponding translation
distance as 0. For example, makehgtform("translate",[0 0 5])
creates a transform matrix that translates only along the
z-axis by 5 units.
M = makehgtform("translate",tx,ty,tz)
Note
You can specify multiple transformations using two or more of the
input argument combinations in the listed syntaxes. For example,
makehgtform("xrotate",pi,"scale",4) scales
uniformly by 4 and rotates around the x-axis by
pi radians. You can specify any number and order
of transformations, and makehgtform applies those
transformations in the reverse order. For more information about how the
order of specified transformations affects the resulting transform
matrix, see Apply Multiple Transformations.
Examples
You can scale a graphics object by using a scaling transform matrix.
Start by creating the axes and adjusting the view. Display grid lines and label the axes.
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
Create a sphere.
[x,y,z] = sphere; s = surface(x,y,z);
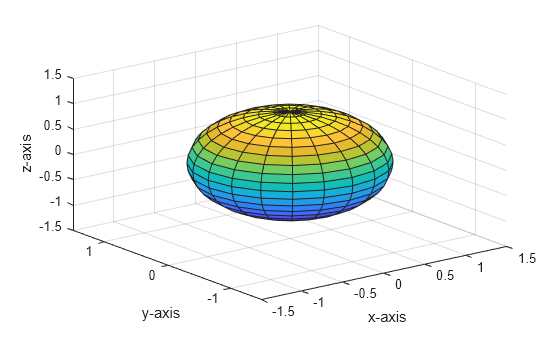
Create a Transform object and parent the sphere to it so that you can apply transformations to the sphere.
h = hgtransform; s.Parent = h;
Create a transform matrix to scale the sphere to be 50% larger. Apply the transform matrix to the sphere by setting the Matrix property of the Transform object h.
S = makehgtform("scale",1.5);
h.Matrix = S;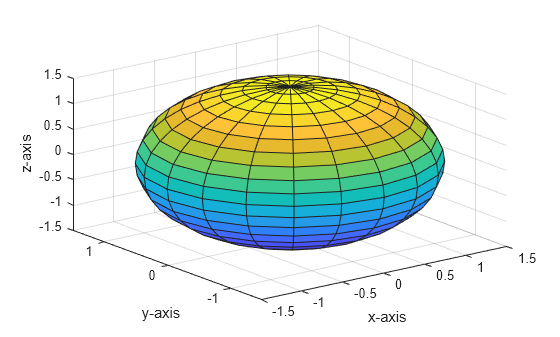
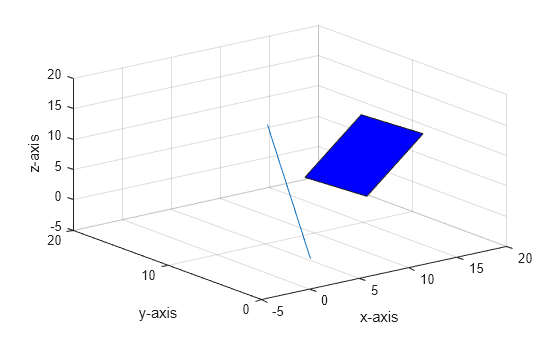
You can rotate a graphics object around a specified axis of rotation by using a rotation transform matrix.
Start by creating the axes and adjusting the view. Display grid lines and label the axes.
ax = axes("XLim",[-5 20],"YLim",[0 20],"ZLim",[-5 20]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
Create a Transform object. Then create a blue rectangle and parent it to the Transform object so that you can apply transformations to it.
h = hgtransform; r = rectangle(ax,Position=[0 10 5 10],FaceColor="b"); r.Parent = h; hold on
Define an axis of rotation by specifying a point (rx,ry,rz). The axis is the line that passes through the origin and this point. Plot the line to visualize the rotation of the rectangle around it.
rx = 10;
ry = 15;
rz = 10;
plot3(ax,[0 rx],[0 ry],[0 rz])
hold off
Create an animation that rotates the rectangle around the axis of rotation by pi radians. Define a transform matrix that rotates the rectangle. Apply this rotation matrix to the Transform object, incrementing the angle of rotation at each iteration of the loop.
for r=0:0.3:pi R = makehgtform("axisrotate",[rx ry rz],r); h.Matrix = R; drawnow pause(0.1) end
You can translate a graphics object by using a translation transform matrix.
Start by creating the axes and adjusting the view. Display grid lines and label the axes.
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
Create a sphere.
[x,y,z] = sphere; s = surface(x,y,z);
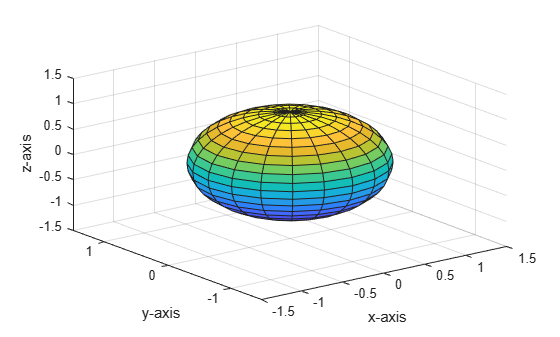
Create a Transform object and parent the sphere to it so that you can apply transformations to the sphere.
h = hgtransform; s.Parent = h;
Then create a transform matrix to translate the sphere 0.5 unit along the x-axis and 0.5 unit along the z-axis. Apply the transform matrix to the sphere by setting the Matrix property of the Transform object h.
Txz = makehgtform("translate",[0.5 0 0.5]);
h.Matrix = Txz;
You can specify multiple transformations in one call to makehgtform. MATLAB® returns a transform matrix that is a composition of all specified transformations. In this example, you rotate graphics around both the x- and y-axes.
Start by creating the axes and adjusting the view. Display grid lines and label the axes.
ax = axes("XLim",[-1.5 1.5],"YLim",[-1.5 1.5],"ZLim",[-1.5 1.5]); view(3) grid on xlabel(ax,"x-axis"); ylabel(ax,"y-axis"); zlabel(ax,"z-axis");
Create the Surface objects you want to rotate, and store them in an array, s.
[x,y,z] = cylinder([0.2 0]); s(1) = surface(x,y,z,FaceColor="red"); s(2) = surface(x,y,-z,FaceColor="green"); s(3) = surface(z,x,y,FaceColor="blue"); s(4) = surface(-z,x,y,FaceColor="cyan"); s(5) = surface(y,z,x,FaceColor="magenta"); s(6) = surface(y,-z,x,FaceColor="yellow");
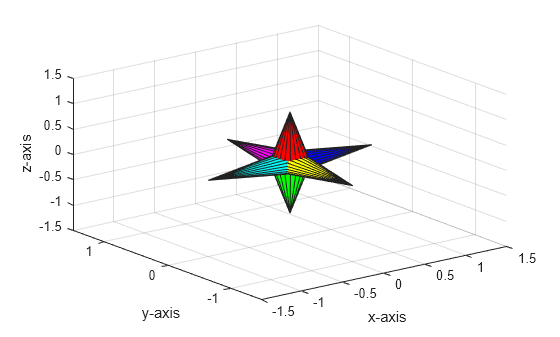
Create a Transform object and parent the Surface objects to it.
h = hgtransform;
set(s,"Parent",h)Create a rotation matrix that performs a rotation first around the x-axis and then around the y-axis. When you specify multiple transforms in a single call to the makehgtform function, the transforms are applied right-to-left. Apply the transform matrix by setting the Matrix property of the Transform object h.
m1 = makehgtform("yrotate",pi/2,"xrotate",pi/2); h.Matrix = m1;
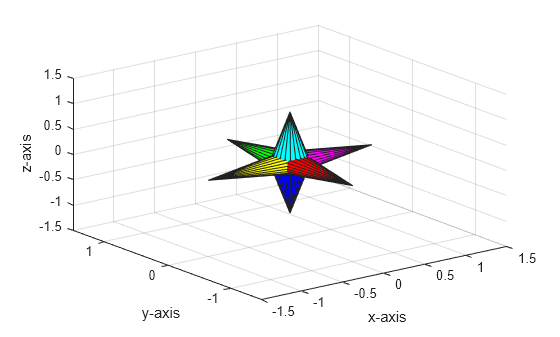
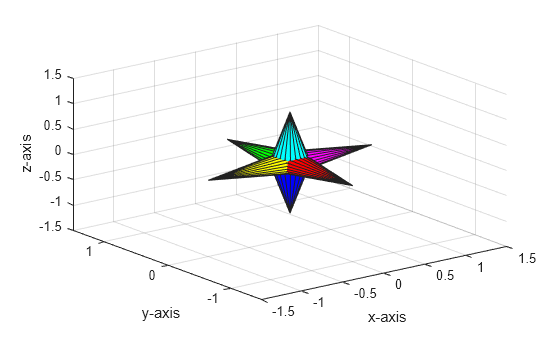
You can obtain the same transform matrix by creating two separate rotation matrices and multiplying them together.
mx = makehgtform("xrotate",pi/2); my = makehgtform("yrotate",pi/2); m2 = my*mx; h.Matrix = m2;
Input Arguments
Output Arguments
More About
Version History
Introduced before R2006a