Perform Manual Gain-Tuning of Current Controller
This step shows you how to manually tune the gains of the d-axis and q-axis current controllers. This step is optional, however you can use it to tune the control gain parameters.
The procedure includes adding a step change to the Id_ref current
and analyzing the current controller performance using the step response of the
Id_meas current to tune the d-axis current
controller. It explains a similar process for the Iq_ref current to
tune the q-axis current controller.
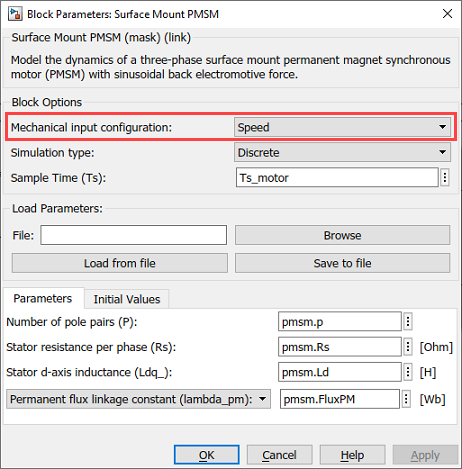
Before starting the manual tuning procedure, you should lock the rotor in the plant
model to ensure that the motor does not run when you provide a step change to
Id_ref or Iq_ref currents. In the
Surface Mount PMSM block parameters dialog box, set the
Mechanical input configuration parameter to
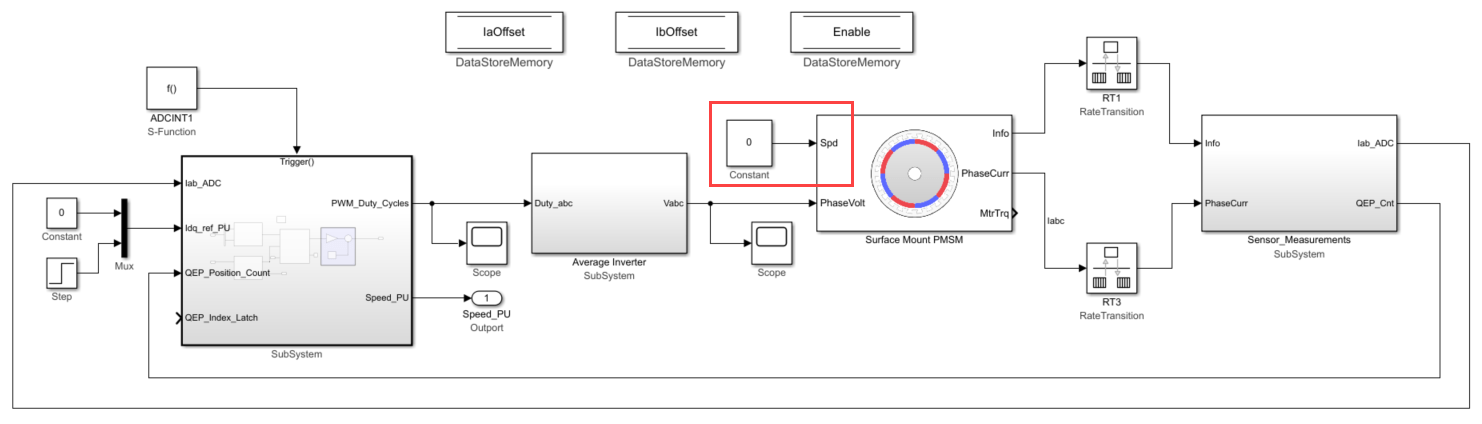
Speed. Set the Spd input (of the
Surface Mount PMSM block) to 0 to ensure that the
rotor is locked.
The integrated plant and controller subsystem simulation model enables you to manually
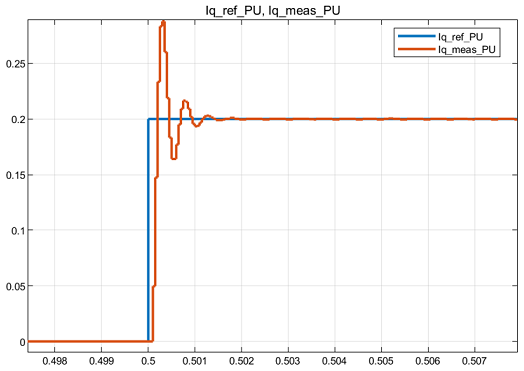
tune the gains of the current controllers. Provide a step input to
Iq_ref in the range (0 to
0.2) PU and observe the measured Iq_meas
current feedback. Adjust the control parameters of the q-axis current
controller to meet your control objectives.
Simulate the model and plot the Iq_ref_PU and
Iq_meas_PU current signals and analyze the step response. This
helps you to tune the control parameters for the q-axis current
controller to meet the control objectives.
Follow the same procedure for the Id_ref current to tune the
d-axis current controller. After tuning both current controllers,
set the Mechanical input configuration parameter, in the
Surface Mount PMSM block parameters dialog box, back to
Torque.