optimizePathOptions
Description
Optimization options are grouped into four categories:
Trajectory Parameters — Specify the desired robot motion throughout the path.
Obstacle Parameters — Specify the distances which dictate the influence of obstacle on the path.
Solver Parameters — Specify the options for solver used to optimize the path.
Weights — Specify the cost function weights.
Note
At a very high level, two primary operations happen inside optimizePath function:
Path Adjustment — Increase (interpolate) or decrease (de-interpolate) poses in the path.
Optimization — Minimize the cost of the path by invoking the solver (Levenberg–Marquardt).
NumIteration property determines how many times Step 1 and 2 will be executed in a loop. MaxSolverIteration property determines the maximum iterations for Levenberg–Marquardt every time it is invoked in Step 2. For the default values, Path Adjustment and Optimization (Solver invocation) will happen four times, and at each invocation the solver will iterate a maximum of 15 times.
Creation
Description
options = optimizePathOptionsoptimizePath
function.
Properties
Examples
Set Up Environment
Load a map into the workspace.
map = load("exampleMaps.mat").complexMap;Create a binary occupancy map.
map = binaryOccupancyMap(map);
Create a state validator object.
stateValidator = validatorOccupancyMap;
Assign the map to the state validator object.
stateValidator.Map = map;
Set the validation distance for the validator.
stateValidator.ValidationDistance = 0.01;
Plan Path
Initialize the plannerHybridAStar object with the state validator object. Specify the MinTurningRadius property of the planner as 2 meters.
planner = plannerHybridAStar(stateValidator,MinTurningRadius=2);
Define start and goal poses as [x y theta] vectors. x and y specify the position in meters, and theta specifies the orientation angle in radians.
start = [6 3 pi/2]; goal = [32 32 0];
Plan a path from the start pose to the goal pose.
path = plan(planner,start,goal); inpath = path.States;
Optimize Path
Configure options for optimization.
options = optimizePathOptions
options =
optimizePathOptions
Trajectory Parameters
MaxPathStates: 200
ReferenceDeltaTime: 0.3000
MinTurningRadius: 1
MaxVelocity: 0.4000
MaxAngularVelocity: 0.3000
MaxAcceleration: 0.5000
MaxAngularAcceleration: 0.5000
Obstacle Parameters
ObstacleSafetyMargin: 0.5000
ObstacleCutOffDistance: 2.5000
ObstacleInclusionDistance: 0.7500
Solver Parameters
NumIteration: 4
MaxSolverIteration: 15
Weights
WeightTime: 10
WeightSmoothness: 1000
WeightMinTurningRadius: 10
WeightVelocity: 100
WeightAngularVelocity: 10
WeightAcceleration: 10
WeightAngularAcceleration: 10
WeightObstacles: 50
Set the minimum turning radius value as same as in the planner.
options.MinTurningRadius = 2;
Specify the maximum number of poses allowed in the optimized path.
options.MaxPathStates = size(inpath,1) * 3;
Maintain a safe distance of 0.75 meters from the obstacles.
options.ObstacleSafetyMargin = 0.75;
Optimize the path generated by the planner.
optpath = optimizePath(inpath,map,options);
Visualize
Visualize input path and optimized path in the map.
show(map) hold on quiver(inpath(:,1),inpath(:,2),cos(inpath(:,3)),sin(inpath(:,3)),0.1); quiver(optpath(:,1),optpath(:,2),cos(optpath(:,3)),sin(optpath(:,3)),0.1); legend("Input Path","Optimized Path")
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, quiver. These objects represent Input Path, Optimized Path.](../../examples/nav/win64/OptimizePlannedPathExample_01.png)
More About
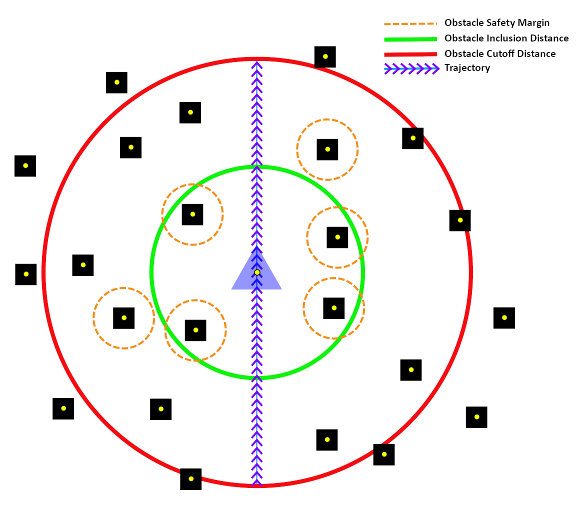
The obstacle parameters ObstacleSafetyMargin, ObstacleInclusionDistance, and ObstacleCutOffDistance determine which obstacles are considered for optimization. Far away obstacles would lead to unnecessary computation and not impact the path optimization.
The ObstacleSafetyMargin property specifies a safe distance to maintain
between the poses of the path and the obstacles. The
ObstacleCutOffDistance property specifies the distance from the
robot beyond which all obstacles are not considered when optimizing the path in that
instance. The ObstacleInclusionDistance property specifies the distance
from the robot within which all obstacles are considered while optimizing the path in that
instance. The path optimizer also considers the closest obstacle to the left and right of
the robot between the inclusion and the cutoff region.
References
[1] Rosmann, Christoph, Frank Hoffmann, and Torsten Bertram. “Kinodynamic Trajectory Optimization and Control for Car-like Robots.” In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 5681–86. Vancouver, BC: IEEE, 2017. https://doi.org/10.1109/IROS.2017.8206458.
Extended Capabilities
Version History
Introduced in R2022a