clearance
Minimum clearance of path
Description
clearance( returns the minimum
clearance of the path. Clearance is measured as the minimum distance between grid cell
centers of states on the path and obstacles in the specified map environment.pathMetricsObj)
Note
The computed clearance is accurate up to sqrt(2) times grid map
cell size.
clearance(
returns the set of minimum distances for each state of the path, in the form of an
n-by-1 vector, where n is the number of
states.pathMetricsObj,'Type','states')
Examples
Compute smoothness, clearance, and validity of a planned path based on a set of poses and the associated map environment.
Load and Assign Map to State Validator
Create an occupancy map from an example map and set the map resolution.
load exampleMaps.mat; % simpleMap mapResolution = 1; % cells/meter map = occupancyMap(simpleMap,mapResolution);
Create a Dubins state space.
statespace = stateSpaceDubins;
Create a state validator based on occupancy map to store the parameters and states in the Dubins state space.
statevalidator = validatorOccupancyMap(statespace);
Assign the map to the validator.
statevalidator.Map = map;
Set the validation distance for the validator.
statevalidator.ValidationDistance = 0.01;
Update the state space bounds to be the same as the map limits.
statespace.StateBounds = [map.XWorldLimits;map.YWorldLimits;[-pi pi]];
Plan Path
Create an RRT* path planner and allow further optimization.
planner = plannerRRTStar(statespace,statevalidator); planner.ContinueAfterGoalReached = true;
Reduce the maximum number of iterations and increase the maximum connection distance.
planner.MaxIterations = 2500; planner.MaxConnectionDistance = 0.3;
Define start and goal states for the path planner as [x, y, theta] vectors. x and y are the Cartesian coordinates, and theta is the orientation angle.
start = [2.5, 2.5, 0]; % [meters, meters, radians]
goal = [22.5, 8.75, 0];Plan a path from the start state to the goal state. The plan function returns a navPath object.
rng(100,'twister') % repeatable result [path,solutionInfo] = plan(planner,start,goal);
Compute and Visualize Path Metrics
Create a path metrics object.
pathMetricsObj = pathmetrics(path,statevalidator);
Check path validity. The result is 1 (true) if the planned path is obstacle free. 0 (false) indicates an invalid path.
isPathValid(pathMetricsObj)
ans = logical
1
Calculate the minimum clearance of the path.
clearance(pathMetricsObj)
ans = 1.4142
Evaluate the smoothness of the path. Values close to 0 indicate a smoother path. Straight-line paths return a value of 0.
smoothness(pathMetricsObj)
ans = 1.7318
Visualize the minimum clearance of the path.
show(pathMetricsObj) legend('Planned Path','Minimum Clearance')
![Figure contains an axes object. The axes object with xlabel X [meters], ylabel Y [meters] contains 5 objects of type image, line, patch. These objects represent Planned Path, Minimum Clearance.](../../examples/nav/win64/ComputePathMetricsExample_01.png)
Plan a vehicle path through a parking lot using the RRT* algorithm. Compute and visualize the smoothness, clearance, and validity of the planned path.
Load and Assign Map to State Validator
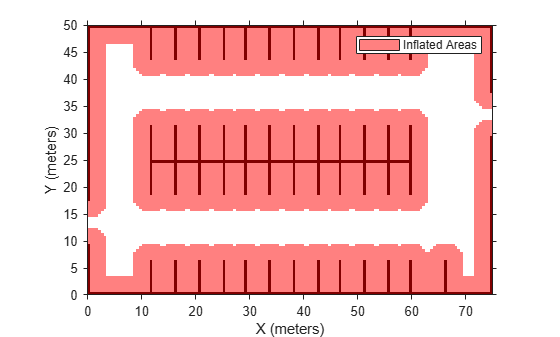
Load a costmap of a parking lot. Plot the costmap to see the parking lot and the inflated areas that the vehicle should avoid.
load parkingLotCostmap.mat; costmap = parkingLotCostmap; plot(costmap) xlabel('X (meters)') ylabel('Y (meters)')
Create a stateSpaceDubins object and increase the minimum turing radius to 4 meters.
statespace = stateSpaceDubins;
statespace.MinTurningRadius = 4; % metersCreate a validatorVehicleCostmap object using the created state space.
statevalidator = validatorVehicleCostmap(statespace);
Assign the parking lot costmap to the state validator object.
statevalidator.Map = costmap;
Plan Path
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the orientation angles Θ are in degrees.
startPose = [5, 5, 90]; % [meters, meters, degrees] goalPose = [40, 38, 180]; % [meters, meters, degrees]
Use a pathPlannerRRT (Automated Driving Toolbox) object and the plan (Automated Driving Toolbox) function to plan the vehicle path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
Interpolate along the path at every one meter. Convert the orientation angles from degrees to radians.
poses = zeros(size(refPath.PathSegments,2)+1,3); poses(1,:) = refPath.StartPose; for i = 1:size(refPath.PathSegments,2) poses(i+1,:) = refPath.PathSegments(i).GoalPose; end poses(:,3) = deg2rad(poses(:,3));
Create a navPath object using the Dubins state space object and the states specified by poses.
path = navPath(statespace,poses);
Compute and Visualize Path Metrics
Create a pathmetrics object.
pathMetricsObj = pathmetrics(path,statevalidator);
Check path validity. The result is 1 (true) if the planned path is obstacle free. 0 (false) indicates an invalid path.
isPathValid(pathMetricsObj)
ans = logical
1
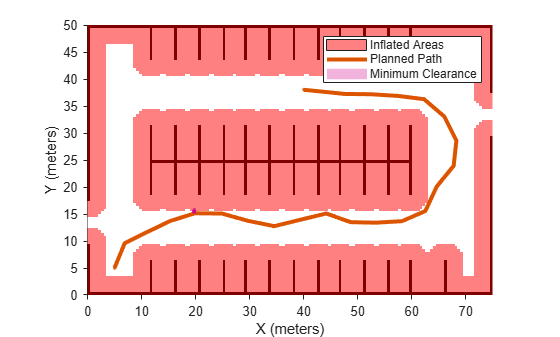
Compute and visualize the minimum clearance of the path.
clearance(pathMetricsObj)
ans = 0.5000
show(pathMetricsObj) legend('Inflated Areas','Planned Path','Minimum Clearance') xlabel('X (meters)') ylabel('Y (meters)')
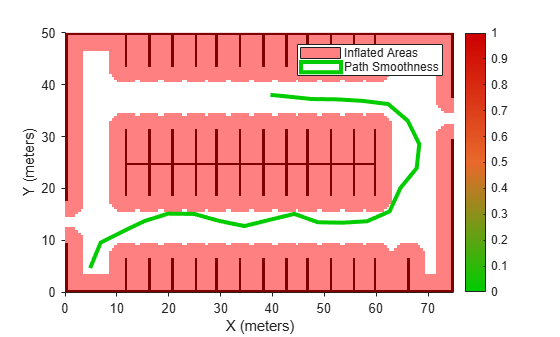
Compute and visualize the smoothness of the path. Values close to 0 indicate a smoother path. Straight-line paths return a value of 0.
smoothness(pathMetricsObj)
ans = 0.0842
show(pathMetricsObj,'Metrics',{'Smoothness'}) legend('Inflated Areas','Path Smoothness') xlabel('X (meters)') ylabel('Y (meters)')
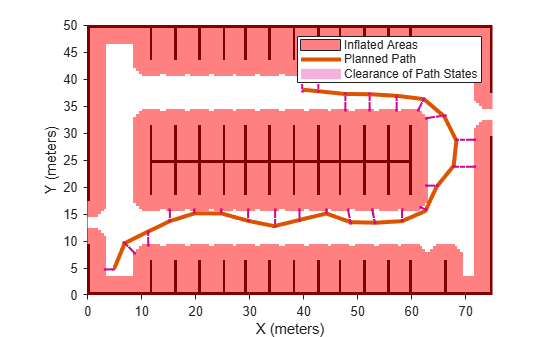
Visualize the clearance for each state of the path.
show(pathMetricsObj,'Metrics',{'StatesClearance'}) legend('Inflated Areas','Planned Path','Clearance of Path States') xlabel('X (meters)') ylabel('Y (meters)')
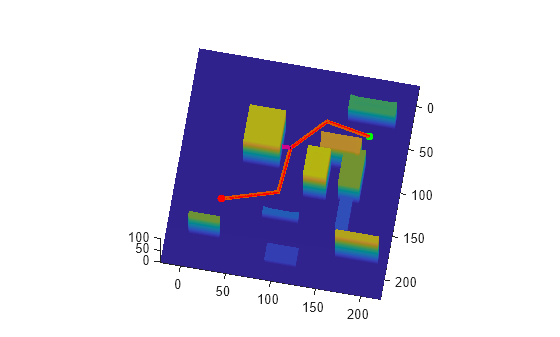
Plan a path through a city block using the RRT algorithm. Compute and visualize the smoothness, clearance, and validity of the planned path.
Load and Assign Map to State Validator
Load a 3-D occupancy map of a city block into the workspace. Specify the threshold to consider cells as obstacle-free.
mapData = load("dMapCityBlock.mat");
omap = mapData.omap;
omap.FreeThreshold = 0.5;Inflate the occupancy map to add a buffer zone for safe operation around the obstacles.
inflate(omap,1)
Create an SE(3) state space object with bounds for state variables.
ss = stateSpaceSE3([0 220;0 220;0 100;inf inf;inf inf;inf inf;inf inf]);
Create a 3-D occupancy map state validator using the created state space. Assign the occupancy map to the state validator object. Specify the sampling distance interval.
sv = validatorOccupancyMap3D(ss, ... Map = omap, ... ValidationDistance = 0.1);
Plan Path
Create a RRT path planner with increased maximum connection distance and reduced maximum number of iterations. Specify a custom goal function that determines that a path reaches the goal if the Euclidean distance to the target is below a threshold of 1 meter.
planner = plannerRRT(ss,sv, ... MaxConnectionDistance = 50, ... MaxIterations = 1000, ... GoalReachedFcn = @(~,s,g)(norm(s(1:3)-g(1:3))<1), ... GoalBias = 0.1);
Specify start and goal poses.
start = [50 180 25 0.7 0.2 0 0.1]; goal = [150 33 35 0.3 0 0.1 0.6];
Configure the random number generator for repeatable result.
rng(1,"twister")Plan the path.
[pthObj,solnInfo] = plan(planner,start,goal);
Compute and Visualize Path Metrics
Create a path metrics object.
pathMetricsObj = pathmetrics(pthObj,sv);
Check path validity. The result is 1 (true) if the planned path is obstacle free. 0 (false) indicates an invalid path.
isPathValid(pathMetricsObj)
ans = logical
1
Calculate the minimum clearance of the path.
clearance(pathMetricsObj)
ans = 10
Evaluate the smoothness of the path. Values close to 0 indicate a smoother path. Straight-line paths return a value of 0.
smoothness(pathMetricsObj)
ans = 0.0011
Visualize the minimum clearance of the path.
show(pathMetricsObj) axis equal view([100 75]) hold on % Start state scatter3(start(1,1),start(1,2),start(1,3),"g","filled") % Goal state scatter3(goal(1,1),goal(1,2),goal(1,3),"r","filled") % Path plot3(pthObj.States(:,1),pthObj.States(:,2),pthObj.States(:,3), ... "r-",LineWidth=2)
Input Arguments
Version History
Introduced in R2019b