Plot Functions
Plot Optimization During Execution
You can plot various measures of progress during the execution of a solver. Use
the PlotFcn name-value argument of optimoptions to specify one or more plotting functions for the
solver to call at each iteration. Pass a function handle, function name, or cell
array of function handles or function names as the PlotFcn
value.
Each solver has a variety of predefined plot functions available. For more
information, see the PlotFcn option description on the function
reference page for a solver.
You can also use a custom plot function, as shown in Create Custom Plot Function. Write a function file using the same structure as an output function. For more information on this structure, see Output Function and Plot Function Syntax.
Use Predefined Plot Functions
This example shows how to use plot functions to view the progress of the fmincon "interior-point" algorithm. The problem is taken from Constrained Nonlinear Problem Using Optimize Live Editor Task or Solver.
Write the nonlinear objective and constraint functions, including their gradients. The objective function is Rosenbrock's function.
function [f,g] = rosenbrockwithgrad(x) % Calculate objective f f = 100*(x(2) - x(1)^2)^2 + (1-x(1))^2; if nargout > 1 % gradient required g = [-400*(x(2)-x(1)^2)*x(1)-2*(1-x(1)); 200*(x(2)-x(1)^2)]; end end
The constraint function is that the solution satisfies norm(x)^2 <= 1.
function [ineqnonlin,eqnonlin,gradineqnonlin,gradeqnonlin] = unitdisk2(x) ineqnonlin = x(1)^2 + x(2)^2 - 1; eqnonlin = [ ]; if nargout > 2 gradineqnonlin = [2*x(1);2*x(2)]; gradeqnonlin = []; end end
Create options for the solver that include calling three plot functions.
options = optimoptions(@fmincon,Algorithm="interior-point",... SpecifyObjectiveGradient=true,SpecifyConstraintGradient=true,... PlotFcn={@optimplotx,@optimplotfval,@optimplotfirstorderopt});
Create the initial point x0 = [0,0], and set the remaining inputs to empty ([]).
x0 = [0,0]; A = []; b = []; Aeq = []; beq = []; lb = []; ub = [];
Call fmincon, including the options.
fun = @rosenbrockwithgrad; nonlcon = @unitdisk2; x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
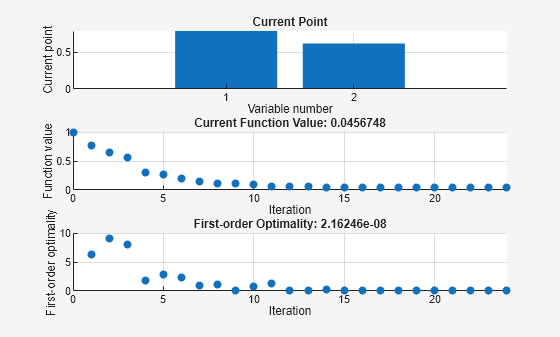
Local minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
x = 1×2
0.7864 0.6177
Create Custom Plot Function
To create a custom plot function for an Optimization Toolbox™ solver, write a function using the syntax
function stop = plotfun(x,optimValues,state) stop = false; switch state case "init" % Set up plot case "iter" % Plot points case "done" % Clean up plots % Some solvers also use case "interrupt" end end
Global Optimization Toolbox solvers use different syntaxes.
The software passes the x, optimValues, and state data to your plot function. For complete syntax details and a list of the data in the optimValues argument, see Output Function and Plot Function Syntax. You pass the plot function name to the solver using the PlotFcn name-value argument.
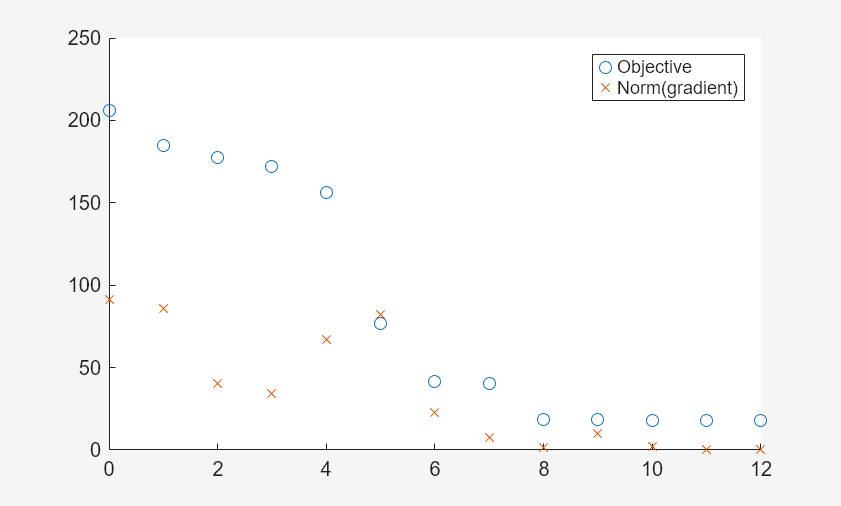
For example, the plotfandgrad helper function listed at the end of this example plots the objective function value and norm of the gradient for a scalar-valued objective function. Use the ras helper function listed at the end of this example as the objective function. The ras function includes a gradient calculation, so for efficiency, set the SpecifyObjectiveGradient name-value argument to true.
fun = @ras; rng(1) % For reproducibility x0 = 10*randn(2,1); % Random initial point opts = optimoptions(@fminunc,SpecifyObjectiveGradient=true,PlotFcn=@plotfandgrad); [x,fval] = fminunc(fun,x0,opts)
Local minimum found. Optimization completed because the size of the gradient is less than the value of the optimality tolerance. <stopping criteria details>
x = 2×1
1.9949
1.9949
fval = 17.9798
The plot shows that the norm of the gradient converges to zero, as expected for an unconstrained optimization.
Helper Functions
This code creates the plotfandgrad helper function.
function stop = plotfandgrad(x,optimValues,state) persistent iters fvals grads % Retain these values throughout the optimization stop = false; switch state case "init" iters = []; fvals = []; grads = []; case "iter" iters = [iters optimValues.iteration]; fvals = [fvals optimValues.fval]; grads = [grads norm(optimValues.gradient)]; plot(iters,fvals,"o",iters,grads,"x"); legend("Objective","Norm(gradient)") case "done" end end
This code creates the ras helper function.
function [f,g] = ras(x) f = 20 + x(1)^2 + x(2)^2 - 10*cos(2*pi*x(1) + 2*pi*x(2)); if nargout > 1 g(2) = 2*x(2) + 20*pi*sin(2*pi*x(1) + 2*pi*x(2)); g(1) = 2*x(1) + 20*pi*sin(2*pi*x(1) + 2*pi*x(2)); end end