phased.Platform
Model platform motion
Description
The phased.Platform
System object™ models the translational motion of one or more platforms in space. A platform
can be a target such as a vehicle or airplane, or a sonar or radar transmitter and receiver.
The model assumes that the platform undergoes translational motion at constant velocity or
constant acceleration during each simulation step. Positions and velocities are always defined
in the global coordinate system.
To model a moving platform:
Create the
phased.Platformobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
sPlat = phased.Platform creates a platform System object, sPlat, with default property values. The object models
a stationary platform with position at the origin and velocity set to zero.
sPlat = phased.Platform(
creates an object, Name,Value)sPlat, with each specified property Name set to
the specified Value. You can specify additional name-value pair arguments in any order as
(Name1,Value1,...,NameN,ValueN).
sPlat = phased.Platform(
creates a platform object, pos,vel,Name,Value)sPlat, with
InitialPosition set to pos and
Velocity set to vel. Other specified property
Names are set to specified Values. The pos and
vel arguments are value-only. Value-only arguments do not require a
specified Name but are interpreted according to their argument positions. To specify any
value-only argument, specify all preceding value-only arguments.
Properties
Usage
To model a moving platform, call the object with arguments, as if it were a function (described here).
Description
[Pos,Vel] = sPlat(T) returns the current position,
Pos, and velocity, Vel, of the platform. The
method then updates the position and velocity. When the MotionModel
property is set to 'Velocity' and the
VelocitySource property is set to 'Property',
the position is updated using the equation Pos = Pos + Vel*T where T specifies the elapsed time (in seconds) for
the current step. When the MotionModel property is set to
'Acceleration' and the AccelerationSource
property is set to 'Property', the position and velocity are updated
using the equations Pos = Pos + Vel*T + 1/2Acl*T^2 and Vel = Vel + Acl*T where T specifies the elapsed time (in seconds) for
the current step.
[Pos,Vel] = sPlat(T,V) returns the current position,
Pos, and the current velocity, Vel, of the
platform. The method then updates the position and velocity using the equation Pos = Pos + Vel*T where T specifies the elapsed time (in seconds) for
the current step. This syntax applies when you set the MotionModel
property to 'Velocity' and the VelocitySource
property to 'Input port'.
[Pos,Vel] = sPlat(T,A) returns the current position,
Pos, and the current velocity, Vel, of the
platform. The method then updates the position and velocity using the equations Pos = Pos + Vel*T + 1/2Acl*T^2 and Vel = Vel + Acl*T where T
specifies the elapsed time (in seconds) for the current step. This syntax applies when you
set the MotionModel property to 'Acceleration' and
the AccelerationSource property to 'Input
port'.
[Pos,Vel,Laxes] = sPlat(___) returns the additional
output Laxes as the platform's orientation axes when you set the
OrientationAxesOutputPort property to
true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a platform at the origin having a velocity of (100,100,0) meters per second. Simulate the motion of the platform for two time steps, assuming the time elapsed for each step is one second. The position of the platform is updated after each step.
sPlat = phased.Platform([0; 0; 0],[100; 100; 0]); T = 1;
At the first call to step, the position is at its initial value.
[pos,v] = step(sPlat,T); pos
pos = 3×1
0
0
0
At the second call to step, the position changes.
[pos,v] = step(sPlat,T); pos
pos = 3×1
100
100
0
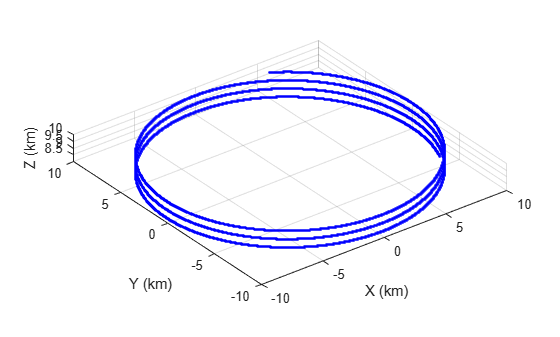
Start with an airplane moving along a circular track with a radius of 10 km at a horizontal speed of 100 m/s and descending at a rate of 1 m/sec. To create circular motion, specify a radially-inward acceleration and constrain the acceleration to lie in the horizontal plane. The acceleration of a body moving in a circle is . The rate of descent is constant. Set the initial orientation axes matrix of the platform to the identity matrix.
Set up the initial conditions
alt = 10000; radcirc = 10000; % 10 km phi = 60; initPos = [cosd(phi)*radcirc;sind(phi)*radcirc;alt]; vs = 100.0; vx = vs*sind(phi); vy = -vs*cosd(phi); vz = -1; initVel = [vx,vy,vz]'; airplane = phased.Platform('MotionModel','Acceleration', ... 'AccelerationSource','Input port','InitialPosition',initPos, ... 'InitialVelocity',initVel,'OrientationAxesOutputPort',true, ... 'InitialOrientationAxes',eye(3)); accelmag = vs^2/radcirc; initPos1 = [cosd(phi)*radcirc;sind(phi)*radcirc;0]; unitvec = initPos1/radcirc; accel = -accelmag*unitvec;
Compute the trajectory
Compute the trajectory for 20000 integration steps at T = 0.1 s intervals
N = 20000; tstep = .10; posmat = zeros(3,N); for n = 1:N [pos,vel,oax] = airplane(tstep,accel); velcirc2 = vel(1)^2 + vel(2)^2; vmag = sqrt(velcirc2); pos1 = [pos(1),pos(2),0]'; radcirc = sqrt(pos1'*pos1); unitvec = pos1/radcirc; accelmag = velcirc2/radcirc; accel = -accelmag*unitvec; posmat(:,n) = pos; end
Display the final orientation of the local coordinate system.
disp(oax)
0.1271 0.9919 0.0001
-0.9919 0.1271 0.0003
0.0003 -0.0001 1.0000
Plot the trajectory
plot3(posmat(1,:)/1000,posmat(2,:)/1000,posmat(3,:)/1000,'b.') xlabel('X (km)') ylabel('Y (km)') zlabel('Z (km)') axis equal grid
This example shows
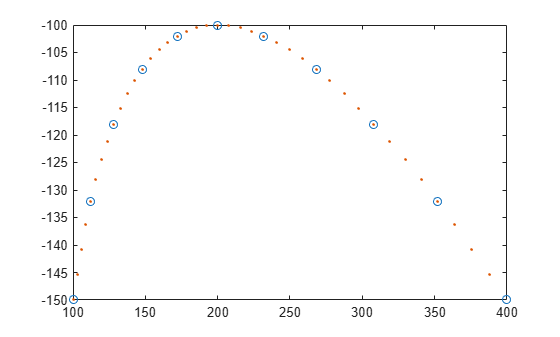
Create waypoints from parabolic motion.
x0 = 100; y0 = -150; z0 = 0; vx = 5; vy = 10; vz = 0; ax = 1; ay = -1; t = [0:2:20]; x = x0 + vx*t + ax/2*t.^2; y = y0 + vy*t + ay/2*t.^2; z = z0*ones(size(t)); wpts = [t.' x.' y.' z.'];
Create a platform object with motion determined using waypoints.
pltfm = phased.Platform('MotionModel','Custom','CustomTrajectory',wpts); tstep = .5; nsteps = 40; X = [];
Advance the platform in time steps of one half second;.
for k = 1:nsteps [pos,vel] = pltfm(tstep); X = [X;pos']; end plot(x,y,'o'); hold on plot(X(:,1),X(:,2),'.') hold off;
Create two moving platforms. The first platform, starting at the origin, has a velocity of (100,100,0) meters per second. The second starts at (1000,0,0) meters and has a velocity of (0,200,0) meters per second. Next, specify different local coordinate axes for each platform defined by rotation matrices. Setting the OrientationAxesOutputPort property to true lets you retrieve the local coordinate axes at each step.
Set up the platform object.
pos0 = [[0;0;0],[1000;0;0]]; vel0 = [[100;100;0],[0;200;0]]; R1 = rotx(30); R2 = roty(45); laxes(:,:,1) = R1; laxes(:,:,2) = R2; sPlat = phased.Platform(pos0,vel0,... 'OrientationAxesOutputPort',true,... 'InitialOrientationAxes',laxes);
Simulate the motion of the platform for two time steps, assuming the time elapsed for each step is one second. The position of the platform is updated after each step.
T = 1;
At the first step, the position and velocity equal the initial values.
[pos,v,lax] = step(sPlat,T); pos
pos = 3×2
0 1000
0 0
0 0
lax
lax =
lax(:,:,1) =
1.0000 0 0
0 0.8660 -0.5000
0 0.5000 0.8660
lax(:,:,2) =
0.7071 0 0.7071
0 1.0000 0
-0.7071 0 0.7071
At the second step, the position is updated.
[pos,v,lax] = step(sPlat,T); pos
pos = 3×2
100 1000
100 200
0 0
lax
lax =
lax(:,:,1) =
1.0000 0 0
0 0.8660 -0.5000
0 0.5000 0.8660
lax(:,:,2) =
0.7071 0 0.7071
0 1.0000 0
-0.7071 0 0.7071
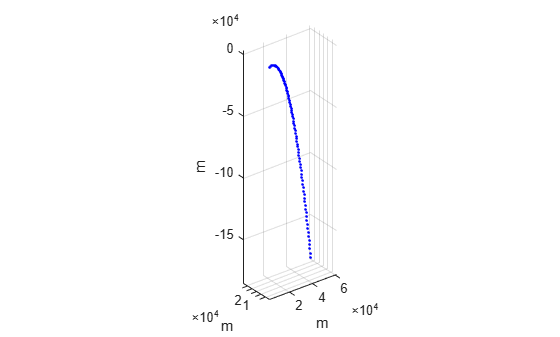
Find the trajectory of a platform which starts with some initial upward velocity but accelerates downward with a constant gravitational acceleration of -9.8 m/sec/sec. Update the platform position and velocity every two seconds.
Construct the platform System object™.
platform = phased.Platform('MotionModel','Acceleration','InitialPosition',[2000,100,3000]',... 'InitialVelocity',[300,150,20]','AccelerationSource','Property','Acceleration',[0,0,-9.8]'); T = 2; N = 100;
Call the step method for 100 time samples.
posmat = zeros(3,N); for n = 1:N [pos,vel] = platform(T); posmat(:,n) = pos; end
Plot the trajectory.
plot3(posmat(1,:),posmat(2,:),posmat(3,:),'b.') axis equal xlabel('m') ylabel('m') zlabel('m') grid
More About
Extended Capabilities
Version History
Introduced in R2011a