step
System object: phased.Platform
Namespace: phased
Output current position, velocity, and orientation axes of platform
Syntax
[Pos,Vel] = step(sPlat,T)
[Pos,Vel] = step(sPlat,T,V)
[Pos,Vel] = step(sPlat,T,A)
[Pos,Vel,Laxes] = step(___)
Description
Note
Starting in R2016b, instead of using the step method to perform the operation defined by the System object™, you can call the object with arguments, as if it were a function. For example, y = step(obj,x) and y = obj(x) perform equivalent operations.
[Pos,Vel] = step(sPlat,T) returns the current
position, Pos, and velocity, Vel,
of the platform. The method then updates the position and velocity.
When the MotionModel property is set to 'Velocity' and
the VelocitySource property is set to 'Property',
the position is updated using the equation Pos
= Pos + Vel*T where T specifies
the elapsed time (in seconds) for the current step. When the MotionModel property
is set to 'Acceleration' and the AccelerationSource property
is set to 'Property', the position and velocity
are updated using the equations Pos =
Pos + Vel*T + 1/2Acl*T^2 and Vel
= Vel + Acl*T where T specifies
the elapsed time (in seconds) for the current step.
[Pos,Vel] = step(sPlat,T,V) returns the
current position, Pos, and the current velocity, Vel,
of the platform. The method then updates the position and velocity
using the equation Pos = Pos + Vel*T where T specifies
the elapsed time (in seconds) for the current step. This syntax applies
when you set the MotionModel property to 'Velocity' and
the VelocitySource property to 'Input
port'.
[Pos,Vel] = step(sPlat,T,A) returns the
current position, Pos, and the current velocity, Vel,
of the platform. The method then updates the position and velocity
using the equations Pos = Pos + Vel*T
+ 1/2Acl*T^2 and Vel = Vel
+ Acl*T where T specifies the elapsed
time (in seconds) for the current step. This syntax applies when you
set the MotionModel property to 'Acceleration' and
the AccelerationSource property to 'Input
port'.
[Pos,Vel,Laxes] = step(___) returns
the additional output Laxes as the platform's
orientation axes when you set the OrientationAxesOutputPort property
to true.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
| Platform Platform, specified as a |
| Step time Step time, specified as a real-valued scalar. Units are seconds |
| Platform velocity Platform velocity, specified as a real-valued 3-by-N matrix
where N is the number of platforms to model. This
argument applies when you set the |
| Platform acceleration Platform acceleration, specified as a real-valued 3-by-N matrix
where N is the number of platforms to model. This
argument applies when you set the |
Output Arguments
| Current platform position Current position of platform, specified as a real-valued 3-by-1
column vector in the form of |
| Current platform velocity Current velocity of platform, specify as a real-valued 3-by-1
column vector in the form of |
| Current platform orientation axes Current platform orientation axes, returned as real-valued 3-by-3-by-N matrix
where N is the number of platforms to model. Each
3-by-3 submatrix is an orthonormal matrix. This output is enabled
when you set the |
Examples
Create two moving platforms. The first platform, starting at the origin, has a velocity of (100,100,0) meters per second. The second starts at (1000,0,0) meters and has a velocity of (0,200,0) meters per second. Next, specify different local coordinate axes for each platform defined by rotation matrices. Setting the OrientationAxesOutputPort property to true lets you retrieve the local coordinate axes at each step.
Set up the platform object.
pos0 = [[0;0;0],[1000;0;0]]; vel0 = [[100;100;0],[0;200;0]]; R1 = rotx(30); R2 = roty(45); laxes(:,:,1) = R1; laxes(:,:,2) = R2; sPlat = phased.Platform(pos0,vel0,... 'OrientationAxesOutputPort',true,... 'InitialOrientationAxes',laxes);
Simulate the motion of the platform for two time steps, assuming the time elapsed for each step is one second. The position of the platform is updated after each step.
T = 1;
At the first step, the position and velocity equal the initial values.
[pos,v,lax] = step(sPlat,T); pos
pos = 3×2
0 1000
0 0
0 0
lax
lax =
lax(:,:,1) =
1.0000 0 0
0 0.8660 -0.5000
0 0.5000 0.8660
lax(:,:,2) =
0.7071 0 0.7071
0 1.0000 0
-0.7071 0 0.7071
At the second step, the position is updated.
[pos,v,lax] = step(sPlat,T); pos
pos = 3×2
100 1000
100 200
0 0
lax
lax =
lax(:,:,1) =
1.0000 0 0
0 0.8660 -0.5000
0 0.5000 0.8660
lax(:,:,2) =
0.7071 0 0.7071
0 1.0000 0
-0.7071 0 0.7071
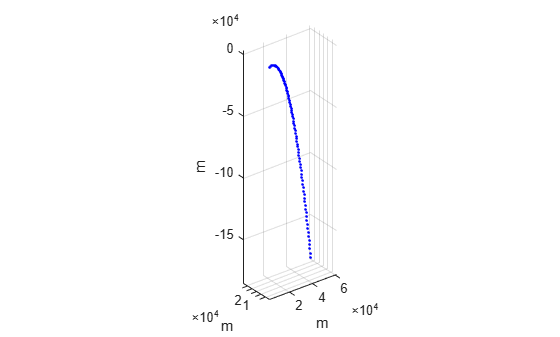
Find the trajectory of a platform which starts with some initial upward velocity but accelerates downward with a constant gravitational acceleration of -9.8 m/sec/sec. Update the platform position and velocity every two seconds.
Construct the platform System object™.
platform = phased.Platform('MotionModel','Acceleration','InitialPosition',[2000,100,3000]',... 'InitialVelocity',[300,150,20]','AccelerationSource','Property','Acceleration',[0,0,-9.8]'); T = 2; N = 100;
Call the step method for 100 time samples.
posmat = zeros(3,N); for n = 1:N [pos,vel] = platform(T); posmat(:,n) = pos; end
Plot the trajectory.
plot3(posmat(1,:),posmat(2,:),posmat(3,:),'b.') axis equal xlabel('m') ylabel('m') zlabel('m') grid