phased.SumDifferenceMonopulseTracker2D
Sum and difference monopulse for URA
Description
The SumDifferenceMonopulseTracker2D
System object™ implements a sum and difference monopulse algorithm for a uniform rectangular
array (URA).
To compute the response for each element in the array for specified directions:
Create the
phased.SumDifferenceMonopulseTracker2Dobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
tracker = phased.SumDifferenceMonopulseTracker2D creates a
tracker System object, tracker. The object uses sum and difference
monopulse algorithms on a uniform rectangular array (URA).
tracker = phased.SumDifferenceMonopulseTracker2D(
creates a URA monopulse tracker object, Name=Value)tracker, with each specified
property Name set to the specified Value. You can specify additional name-value pair
arguments in any order as (Name1 = Value1, …
,NameN = ValueN).
Properties
Usage
Description
ESTANG = tracker(X,STANG)ESTANG of the input signal,
X, based on an initial guess of the direction.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Algorithms
The sum-and-difference monopulse algorithm is used to the estimate the arrival direction of a narrowband signal impinging upon a uniform linear array (ULA). First, compute the conventional response of an array steered to an arrival direction φ0. For a ULA, the arrival direction is specified by the broadside angle. To specify that the maximum response axis (MRA) point towards the φ0 direction, set the weights to be
where d is the element spacing and k = 2π/λ is the wavenumber. An incoming plane wave, coming from any arbitrary direction φ, is represented by
The conventional response of this array to any incoming plane wave is given by and is shown in the polar plot below as the Sum Pattern. The array is designed to steer towards φ0 = 30°.
The second pattern, called the Difference Pattern, is obtained by using phased-reversed weights. The weights are determined by phase-reversing the latter half of the conventional steering vector. For an array with an even number of elements, the phase-reversed weights are
(For an array with an odd number of elements, the middle weight is set to zero). The multiplicative factor –i is used for convenience. The response of the difference array to the incoming vector is
This figure shows the sum and difference beam patterns of a four-element uniform linear array (ULA) steered 30° from broadside. The array elements are spaced at one-half wavelength. The sum pattern shows that the array has its maximum response at 30° and the difference pattern has a null at 30°.
![]()
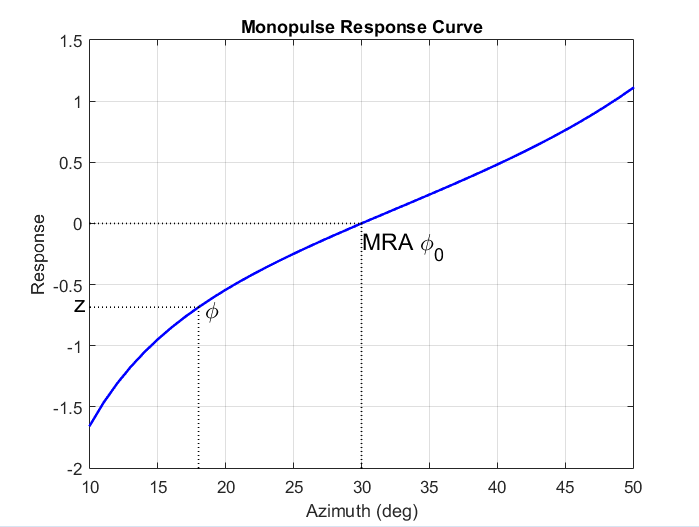
The monopulse response curve is obtained by dividing the difference pattern by the sum pattern and taking the real part.
To use the monopulse response curve to obtain the arrival angle, φ, of a narrowband signal, x, compute
and invert the response curve, φ = R-1(z), to obtain φ.
The response curve is not generally single valued and can only be inverted when arrival angles lie within the main lobe where it is single valued This figure shows the monopulse response curve within the main lobe of the four-element ULA array.
There are two desirable properties of the monopulse response curve. The first is that it have a steep slope. A steep slope ensures robustness against noise. The second property is that the mainlobe be as wide as possible. A steep slope is ensure by a larger array but leads to a smaller mainlobe. You will need to trade off one property with the other.
For further details, see [1].
References
[1] Seliktar, Y. Space-Time Adaptive Monopulse Processing. Ph.D. Thesis. Georgia Institute of Technology, Atlanta, 1998.
[2] Rhodes, D. Introduction to Monopulse. Dedham, MA: Artech House, 1980.
Extended Capabilities
Version History
Introduced in R2011a