Synchronous Machine SI Fundamental
(To be removed) Model dynamics of three-phase round-rotor or salient-pole synchronous machine using fundamental parameters in SI units
The Specialized Power Systems library will be removed in R2026a. Use the Simscape™ Electrical™ blocks and functions instead. For more information on updating your models, see Upgrade Specialized Power Systems Models to use Simscape Electrical Blocks.

Libraries:
Simscape /
Electrical /
Specialized Power Systems /
Electrical Machines
Description
The Synchronous Machine SI Fundamental block models a synchronous machine in generator or motor mode using fundamental parameters in SI units. The operating mode is dictated by the sign of the mechanical power (positive for generator mode or negative for motor mode). The electrical part of the machine is represented by a sixth-order state-space model and the mechanical part is the same as in the Simplified Synchronous Machine block.
The model takes into account the dynamics of the stator, field, and damper windings. The equivalent circuit of the model is represented in the rotor reference frame (qd frame). Stator windings are connected in wye to an internal neutral point. All rotor parameters and electrical quantities are viewed from the stator and identified by primed variables. The subscripts are:
d,q — d- and q-axis quantity
R,s — Rotor and stator quantity
l,m — Leakage and magnetizing inductance
f,k — Field and damper winding quantity
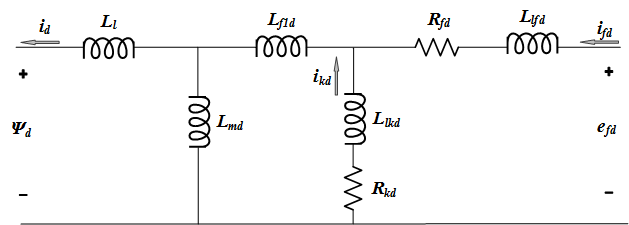
The electrical model of the machine is shown in these diagrams.

Dynamic Model with Unequal Mutual Inductance
The conventional theory of synchronous machine modeling for stability analysis assumes that the mutual inductances between the armature, damper, and field on direct-axis windings are identical. Generally, damper windings are near the air gap, and as a result the flux linking damper circuits are almost equal to the flux linking armature. This hypothesis produces acceptable outcomes for a wide range of stability studies, especially those on the side of the network. However, when it comes to field current studies, there is considerable error. The equivalent circuit dynamic model of a synchronous machine may include an additional inductance representing the difference between field-damper and field-armature mutual inductances on the D-axis [1]. This inductance is typically called Canay inductance. Canay inductance corresponds to the leakage flux, ΦC, in the following figure and is interpreted as a corrective element in an equivalent model that may have a negative value [2].

The IEEE® standard 1110-2002 [3] presents the direct and quadratic axes of the synchronous machine dynamic model as shown in the diagrams.

The relevant equations are:
Base Values, Transformation Ratio, and Rotor Parameters Referred to the Stator
The Synchronous Machine SI Fundamental block allows you to specify the fundamental parameters of a synchronous machine. You enter field and damper winding parameters (resistances, leakage inductances, and mutual inductances) in SI (Ω, H). The RL parameters of the field and damper windings are not the actual field RL values of the machine but the RL values referred to the stator.
This table displays the stator base values.
| Base stator voltage = peak nominal line-to-neutral voltage (V) |
| Base stator current (A) |
| Base stator impedance (Ω) |
| Base angular frequency (rad/s) |
| Base stator inductance (H) |
where:
Pn is the three-phase nominal power (VA).
Vn is the nominal line-to-line voltage (Vrms).
fn is the nominal frequency (Hz).
ifn is the nominal field current producing nominal stator voltage at no load (A).
The stator parameters to specify in the block are:
| Rs | Stator resistance per phase (Ω) |
| Ll | Stator leakage inductance (H) |
| Lmd | Direct-axis magnetizing inductance viewed from stator (H) |
| Lmq | Quadrature-axis magnetizing inductance viewed from stator (H) |
This figure shows one phase of the stator winding coupled with the field winding.

In the diagram:
Ns and Nf are the equivalent number of sinusoidally distributed turns of the stator winding and of the field winding, respectively.
Rs and Ll are stator resistance and leakage inductance.
Rf′ and Llfd′ are field resistance and leakage inductance.
When the three stator windings are energized with a three-phase positive-sequence voltage and the field winding is open, the stator magnetizing inductance is Lmd. However, when only one phase is energized and the field winding is open, the magnetizing inductance is 2/3 Lmd, as shown in the figure.
At no load, when the field winding is rotating at nominal speed and bears the nominal field DC current ifn, the amplitude of AC voltage (peak value) induced on one phase of the stator is Vsbase.
The maximum mutual inductance between one stator winding and the field winding is obtained when the two windings are aligned and is given by:
from which we deduce the transformation ratio:
The transformation ratio can be also expressed as:
where Ifbase is the base field current. The table shows how to compute field base values.
| Base field current (A) |
| Base field voltage (V) |
| Base field impedance (Ω) |
| Base field inductance (H) |
The actual field parameters are:
Rf′ is field resistance (Ω)
Llfd′ is field leakage inductance (H)
You can specify field parameters for the field resistance and leakage inductance referred to the stator (Rf, Llfd).
If the nominal field current ifn is known, the transformation ratio Ns / Nf is calculated using the same equation as for the stator/field transformation ratio.
According to Krause [4], the field voltage and current referred to the stator (Vf, If) are deduced from actual Vf′ , If′ values as follows:
When the actual field resistance Rf′ and leakage inductances Llfd′ (seen from the rotor) are known, the values referred to the stator are:
When the nominal field current is not known, and if the pu values of field resistance and leakage inductances are known (Rf_pu, Llfd_pu), the corresponding SI values referred to the stator are computed as follows:
The same conversions are used for RL parameters of damper windings.
When you specify the nominal field current, the signal at the Vf input port corresponds to the actual field voltage, as in real life. The field current returned by the measurement output also corresponds to the actual field current If.
The nominal field voltage producing nominal stator voltage at no load is given by:
When you do not specify the nominal field current, the signal at the Vf input port corresponds to the actual field voltage referred to the stator. In this case, the nominal field voltage referred to the stator producing nominal stator voltage at no load is:
The field current returned by the measurement output is the field current referred to the stator. The nominal field current referred to the stator is:
Assumptions and Limitations
In discrete systems, when you set the Discrete solver model
parameter of a Synchronous Machine block to Trapezoidal non
iterative, you might have to connect a small parasitic resistive load
at the machine terminals to avoid numerical oscillations. Large sample times require
larger loads. The minimum resistive load is proportional to the sample time. As a rule
of thumb, remember that with a 25 μs time step on a 60 Hz system, the minimum load is
approximately 2.5% of the machine nominal power. For example, a 200 MVA synchronous
machine in a power system discretized with a 50 μs sample time requires approximately 5%
of resistive load or 10 MW. If the sample time is reduced to 20 μs, a resistive load of
4 MW should be sufficient.
However, if you set the Discrete solver model parameter of a
Synchronous Machine block to Trapezoidal iterative (alg.
loop), you can use a negligible parasitic load (below 0.1% of nominal
power) while preserving numerical stability. This iterative model produces an algebraic
loop and results in slower simulation speed.
Ports
Input
Output
Conserving
Parameters
In power system analysis software, the synchronous machine equations are commonly solved using the direct-quadrature-zero transformation technique. The RL parameters of field and damper windings are not the actual field RL values of the machine but the RL values referred to the stator. The rotor side parameters are transferred to stator side and normalized before entering the final processing.
Configuration
Set of predetermined electrical and mechanical parameters for various synchronous machine ratings of power (kVA), phase-to-phase voltage (V), frequency (Hz), and rated speed (rpm).
Select one of the preset models to load the corresponding electrical and mechanical parameters. Choices are:
01: 50Hz 400V 8.1kVA 1500RPM02: 50Hz 400V 16kVA 1500RPM03: 50Hz 400V 31.3kVA 1500RPM04: 50Hz 400V 42.5kVA 1500RPM05: 50Hz 400V 60kVA 1500RPM06: 50Hz 400V 85kVA 1500RPM07: 50Hz 400V 250kVA 1500RPM08: 50Hz 400V 325kVA 1500RPM09: 50Hz 400V 670kVA 1500RPM10: 50Hz 400V 910kVA 1500RPM11: 50Hz 400V 1320kVA 1500RPM12: 50Hz 400V 2000kVA 1500RPM13: 60Hz 460V 10.2kVA 1800RPM14: 60Hz 460V 20kVA 1800RPM15: 60Hz 460V 37.5kVA 1800RPM16: 60Hz 460V 52.5kVA 1800RPM17: 60Hz 460V 72.5kVA 1800RPM18: 60Hz 460V 100kVA 1800RPM19: 60Hz 460V 300kVA 1800RPM20: 60Hz 460V 406kVA 1800RPM21: 60Hz 460V 800kVA 1800RPM22: 60Hz 460V 1075kVA 1800RPM23: 60Hz 460V 1588kVA 1800RPM24: 60Hz 460V 2500kVA 1800RPM
Select No (default) if you do not want to use a preset model
or if you want to modify some of the parameters of a preset model, as
described below.
When you select a preset model, the electrical and mechanical parameters in the Parameters tab are dimmed). To start from a preset model and then modify the machine parameters:
Select the preset model for which you want to initialize the parameters.
Change the Preset model parameter to
No. This action does not change the machine parameters, but breaks the connection with the preset model.Modify the machine parameters as you want.
Whether to represent the mechanical power applied to the shaft or the rotor speed as a Simulink® input of the block, or to represent the machine shaft with a Simscape rotational mechanical port.
Select Mechanical power Pm to specify a mechanical power
input, in W, and expose the Pm port. The machine
speed is determined by the machine inertia J and by
the difference between the mechanical torque Tm,
which results from the applied mechanical power Pm,
and the internal electromagnetic torque Te. When the
speed is positive, a positive mechanical power signal indicates
generator mode and a negative signal indicates motor mode.
Select Speed w to specify a speed input in rad/s and expose
the w port. The machine speed is imposed and the
mechanical part of the model (the machine inertia J)
is ignored. Using the speed as the mechanical input allows you to model
a mechanical coupling between two machines.
The next figure indicates how to model a stiff shaft interconnection in a motor-generator set where both machines are synchronous machines.
The speed output of machine 1 (the motor) is connected to the speed input of machine 2 (the generator). In this figure, friction torque is ignored in machine 2. Therefore, its electromagnetic torque output Te corresponds to the mechanical torque Tm applied to the shaft of machine 1. The corresponding mechanical input power of machine 1 is computed as Pm = Tm*w.The Kw factor takes into account the speed units of both machines (rad/s) and the gear box ratio w2/w1. The KT factor takes into account the torque units of both machines (N.m) and the machine ratings. Also, because inertia J2 is ignored in machine 2, J2 refers to the speed of machine 1 and must be added to machine 1 inertia J1.
Select Mechanical rotational port to expose a Simscape mechanical rotational port, S, that
allows you to connect of the machine shaft to another machine shaft or
to other Simscape blocks that have mechanical rotational ports.
The figure indicates how to connect an Ideal Torque Source block from the Simscape library to the machine shaft port to represent the machine in motor mode or generator mode when the rotor speed is positive.

Specify the rotor type as either Salient-pole or
Round (cylindrical). The setting affects
the number of rotor circuits in the q-axis (damper
windings).
When this check box is selected, the measurement output uses the signal names to identify the bus labels. Select this option for applications that require bus signal labels to have only alphanumeric characters.
When this check box is cleared, the measurement output uses the signal definition to identify the bus labels. The labels contain nonalphanumeric characters that are incompatible with some Simulink applications.
Parameters
Total three-phase apparent power Pn (VA), RMS line-to-line voltage Vn (V), frequency fn (Hz), and field current ifn (A).
The nominal field current is the current that produces the nominal terminal voltage under no-load conditions. This model was developed with all quantities viewed from the stator, as explained in Krause [4]. The nominal field current makes it possible to compute the transformation ratio of the machine, which allows you to apply the field voltage viewed from the rotor, as in real life. It also allows the field current, which is a variable in the output vector of the model, to be viewed from the rotor.
If the value of the nominal field current is not known, you must enter
0 or leave it blank. Because the transformation
ratio cannot be determined in this case, you have to apply the field
voltage as viewed from the stator. The field current in the output
vector is also viewed from the stator.
Resistance Rs (Ω), leakage inductance Lls (H),
d-axis and q-axis magnetizing
inductances Lmd (H) and Lmq (H),
and Canay inductance. If the value of the Canay inductance in not known,
you must enter 0 or leave it blank.
Field resistance Rf (Ω) and leakage inductance Llfd (H), both referred to the stator.
d-axis resistance Rkd (Ω) and leakage inductance Llkd (H), and q-axis resistance Rkq1 (Ω) and leakage inductance Llkq1 (H). All of these values are referred to the stator.
Dependencies
To enable this parameter, set Rotor type to
Salient-pole.
d-axis resistance Rkd (Ω) and leakage inductance Llkd (H), q-axis resistance Rkq1 (Ω) and leakage inductance Llkq1 (H), and q-axis resistance Rkq2 (Ω) and leakage inductance Llkq2 (H). All of these values are referred to the stator.
Dependencies
To enable this parameter, set Rotor type to
Round.
Inertia coefficient J (kg.m2), friction factor F (N.m.s), and the number of pole pairs p. The friction torque Tf is proportional to the rotor speed ω (Tf = F.ω.) Tf is expressed in N.m, F in N.m.s, and ω in rad/s.
Dependencies
To enable this parameter, set Mechanical
input to Mechanical power
Pm or Mechanical rotational
port.
Number of pole pairs of the synchronous machine.
Dependencies
To enable this parameter, set Mechanical
input to Speed w.
Initial speed deviation Δω (percent of nominal speed), electrical angle of the rotor Θe (degrees), line current magnitudes ia, ib, ic (A) and phase angles pha, phb, phc (degrees), and the initial field voltage Vf (V). You can compute these values automatically by using the Load Flow tool or the Machine Initialization tool of the powergui block.
You can specify the initial field voltage in one of two ways. If you know the nominal field current (first line, last parameter), enter the initial field voltage in volts DC referred to the rotor. Otherwise, enter a zero as the nominal field current and specify the initial field voltage in volts DC referred to the stator. You can determine the nominal field voltage viewed from the stator by selecting the Display nominal field current and voltage producing 1 pu stator voltage check box on the Advanced tab.
Whether magnetic saturation of the rotor and stator iron is simulated.
Select this check box to provide the matrix of parameters for simulating the saturation.
Clear this check box to not model saturation in your simulation. In this case, the relationship between the ifd and Vt is linear (no saturation).
No-load saturation curve parameters. The magnetic saturation of the stator and rotor
iron is modeled by a piecewise linear relationship specifying points on
the no-load saturation curve. The first row of this matrix contains the
values of field currents. The second row contains values of
corresponding terminal voltages. The first point (first column of the
matrix) must be different from [0,0]. This point
corresponds to the point where the effect of saturation begins. For
saturation, the nominal field current and nominal RMS line-to-line
voltage are the base values for the field current and terminal voltage,
respectively.
Click Plot to view the no-load saturation curve.
Dependencies
To enable this parameter, select Simulate saturation.
Advanced
To enable the Advanced tab, in the powergui
block, set Simulation type to
Discrete and clear Automatically handle
discrete solver.
Select to determine the nominal field current and voltage viewed from the stator.
For example, without saturation, the figure shows a typical curve. ifn is 1087 A and Vn is 13800 V RMS line-to-line, which is also 11268 V peak line-to-neutral.

The saturation is modeled as a piecewise linear saturation curve by using two lookup tables implementing variations of Lmd and Lmq magnetizing inductances.
The next figure illustrates the good fit graphically (the diamonds are the actual points entered in the dialog box).

In this case, the following values are used:
ifn | 1087 A |
ifd | [695.64, 774.7, 917.5, 1001.6, 1082.2, 1175.9, 1293.6, 1430.2, 1583.7] A |
Vt | [9660, 10623, 12243, 13063, 13757, 14437, 15180, 15890, 16567] V |
Sample time used by the block. To inherit the sample time specified in the
powergui block, set this parameter to
−1.
Integration method used by the block when the Solver type parameter
of the powergui block is set to
Discrete.
The Discrete solver model is automatically set to
Trapezoidal robust when you select the
Automatically handle Discrete solver and Advanced tab
solver settings of blocks parameter of the
powergui block.
The Trapezoidal non iterative and Trapezoidal
iterative (alg. loop) methods are no longer
recommended for discretizing the Synchronous Machine SI
Fundamental block. Trapezoidal non
iterative requires you to add non-negligible shunt
loads at the machine terminals to guarantee simulation stability, and
Trapezoidal iterative (alg. loop) may
fail to converge and cause the simulation to stop when the number of
machines increases in the model.
The Trapezoidal robust and Backward Euler
robust methods allow you to eliminate the need to use
parasitic loads and simulate a machine without loads. To eliminate
topological errors of machines connected to an inductive circuit (for
example, a circuit breaker connected in series with the machine); the
machine models a negligible internal load of 0.01% of nominal
power.
The Trapezoidal robust method is slightly more accurate than
the Backward Euler robust method, especially
when the model is simulated at larger sample times. The
Trapezoidal robust method may produce
slight damped numerical oscillations on machine voltage at no-load
conditions, while the Backward Euler robust
method prevents oscillations and maintains good accuracy.
Load Flow
The load flow parameters are used to define block parameters for use with the Load Flow tool of the powergui block. These load flow parameters are used for model initialization only. They have no impact on the block model or on the simulation performance.
Generator type of the machine. Choice are:
swing— Implements a generator controlling magnitude and phase angle of its terminal voltage. The reference voltage magnitude and angle are specified by the Swing bus or PV bus voltage and Swing bus voltage angle parameters of the Load Flow Bus block connected to the machine terminals.PV— Implements a generator controlling its output active power P and voltage magnitude V. P is specified by the Active power generation P (W) parameter of the block. V is specified by the Swing bus or PV bus voltage parameter of the Load Flow Bus block connected to the machine terminals. You can control the minimum and maximum reactive power generated by the block by using the Minimum reactive power Qmin (var) and Maximum reactive power Qmax (var) parameters.PQ— Implements a generator controlling its output active power P and reactive power Q. P and Q are specified by the Active power generation P (W) and Reactive power generation Q (var) parameters of the block, respectively.
Active power that you want generated by the machine, in watts. When the machine operates in motor mode, you specify a negative value.
Dependencies
To enable this parameter, set Generator type
to PV or
PQ.
Reactive power that you want generated by the machine, in vars. A negative value indicates that the reactive power is absorbed by the machine.
Dependencies
To enable this parameter, set Generator type
to PQ.
Minimum reactive power that can be generated by the machine while keeping the terminal
voltage at its reference value. This reference voltage is specified by
the Swing bus or PV bus voltage parameter of the
Load Flow Bus block connected to the machine
terminals. The default value is -inf, which means
that there is no lower limit on the reactive power output.
Dependencies
To enable this parameter, set Generator type
to PV.
Maximum reactive power that can be generated by the machine while keeping the terminal
voltage at its reference value. This reference voltage is specified by
the Swing bus or PV bus voltage parameter of the
Load Flow Bus block connected to the machine
terminals. The default value is inf, which means that
there is no upper limit on the reactive power output.
Dependencies
To enable this parameter, set Generator type
to PV.
References
[1] Canay, I.M. "Causes of Discrepancies on Calculation of Rotor Quantities and Exact Equivalent Diagrams of the Synchronous Machine." IEEE Transactions on Power Apparatus and Systems. PAS-88, no. 7 (1969): 1114–1120.
[2] Moeini, A., et al. “Synchronous Machine Stability model, an Update to IEEE Std 1110-2002 Data Translation Technique.” IEEE standards panel sessions. 2018.
[3] IEEE Guide for Synchronous Generator Modeling Practices and Applications in Power System Stability Analyses. IEEE Std 1110-2002 (Revision of IEEE Std 1110-1991 [2003]): 1–72.
[4] Krause, P.C. Analysis of Electric Machinery. Section 12.5. New York: McGraw-Hill, 1986.
[5] Kundur, P. Power System Stability and Control. New York, McGraw-Hill, 1994.
Extended Capabilities
Version History
Introduced before R2006a