rosbag
Open and parse rosbag log file
Description
bag = rosbag(filename)BagSelection object,
bag, that contains all the message indexes from the
rosbag at path filename. To get a
BagSelection object, use rosbag. To access the data, call
readMessages or timeseries to extract relevant
data.
A rosbag, or bag, is a file format for storing ROS message data. They are used primarily to log messages within the ROS network. You can use these bags for offline analysis, visualization, and storage. See the ROS Wiki page for more information about rosbags.
Examples
Retrieve information from the rosbag. Specify the full path to the rosbag if it is not already available on the MATLAB® path.
bagselect = rosbag('ex_multiple_topics.bag');Select a subset of the messages, filtered by time and topic.
bagselect2 = select(bagselect,'Time',... [bagselect.StartTime bagselect.StartTime + 1],'Topic','/odom');
To view information about a rosbag log file, use rosbag info filename**, where filename is a rosbag (.bag) file.
rosbag info 'ex_multiple_topics.bag'
Path: /tmp/Bdoc26a_3233028_1743803/tp26e6ebba/ros-ex32890909/ex_multiple_topics.bag
Version: 2.0
Duration: 2:00s (120s)
Start: Dec 31 1969 19:03:21.34 (201.34)
End: Dec 31 1969 19:05:21.34 (321.34)
Size: 23.6 MB
Messages: 36963
Types: gazebo_msgs/LinkStates [48c080191eb15c41858319b4d8a609c2]
nav_msgs/Odometry [cd5e73d190d741a2f92e81eda573aca7]
rosgraph_msgs/Clock [a9c97c1d230cfc112e270351a944ee47]
sensor_msgs/LaserScan [90c7ef2dc6895d81024acba2ac42f369]
Topics: /clock 12001 msgs : rosgraph_msgs/Clock
/gazebo/link_states 11999 msgs : gazebo_msgs/LinkStates
/odom 11998 msgs : nav_msgs/Odometry
/scan 965 msgs : sensor_msgs/LaserScan
Get transformations from rosbag (.bag) files by loading the rosbag and checking the available frames. From these frames, use getTransform to query the transformation between two coordinate frames.
Load the rosbag.
bag = rosbag('ros_turtlesim.bag');Get a list of available frames.
frames = bag.AvailableFrames;
Get the latest transformation between two coordinate frames.
tf = getTransform(bag,'world',frames{1});Check for a transformation available at a specific time and retrieve the transformation. Use canTransform to check if the transformation is available. Specify the time using rostime.
tfTime = rostime(bag.StartTime + 1); if (canTransform(bag,'world',frames{1},tfTime)) tf2 = getTransform(bag,'world',frames{1},tfTime); end
Load the rosbag.
bag = rosbag('ros_turtlesim.bag');Select a specific topic.
bSel = select(bag,'Topic','/turtle1/pose');
Read messages as a structure. Specify the DataFormat name-value pair when reading the messages. Inspect the first structure in the returned cell array of structures.
msgStructs = readMessages(bSel,'DataFormat','struct'); msgStructs{1}
ans = struct with fields:
MessageType: 'turtlesim/Pose'
X: 5.5016
Y: 6.3965
Theta: 4.5377
LinearVelocity: 1
AngularVelocity: 0
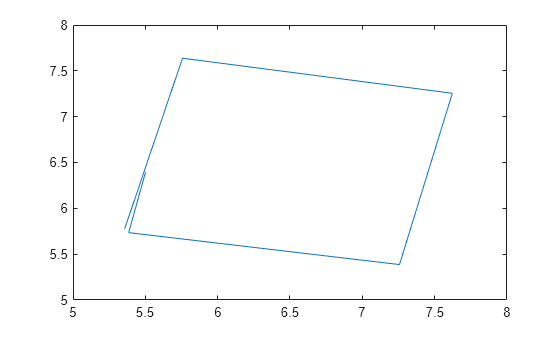
Extract the xy points from the messages and plot the robot trajectory.
Use cellfun to extract all the X and Y fields from the structure. These fields represent the xy positions of the robot during the rosbag recording.
xPoints = cellfun(@(m) double(m.X),msgStructs); yPoints = cellfun(@(m) double(m.Y),msgStructs); plot(xPoints,yPoints)
Input Arguments
Output Arguments
Version History
Introduced in R2019b
See Also
select | readMessages | canTransform | getTransform | timeseries | BagSelection