loopsyn
Loop-shaping controller design with tradeoff between performance and robustness
Syntax
Description
loopsyn balances performance and robustness by blending two
loop-shaping methods.
You can adjust the tradeoff between performance and robustness to obtain satisfactory time-domain responses while avoiding fragile designs with plant inversion or flexible mode cancellation.
[
computes a stabilizing controller K,CL,gamma,info] = loopsyn(G,Gd)K that shapes the open-loop response
G*K to approximately match the specified loop shape
Gd. The mixed-sensitivity performance gamma
indicates the closeness of the match. loopsyn tries to minimize
gamma, subject to the constraint that the robustness with
K (as measured by ncfmargin) is no worse than
half the maximum achievable robustness. The function also returns the closed-loop transfer
function CL and a structure info containing
further information about the controller synthesis.
[
explicitly specifies the tradeoff between performance and robustness with parameter
K,CL,gamma,info] = loopsyn(G,Gd,alpha)alpha in the interval [0,1]. Within this interval, smaller
alpha favors performance (mixsyn design) and
larger alpha favors robustness (ncfsyn design).
When you specify alpha, loopsyn tries to minimize
gamma, subject to the constraint that the robustness is no worse than
alpha times the maximum achievable robustness.
Examples
Consider the following plant.
s = zpk('s');
G = (s-10)/(s+100);Design a controller that yields a closed-loop step response with a rise time of about 4 s. A simple target loop shape for this requirement is Gd = wc/s, where the target crossover frequency wc is related to the desired rise time by t = 2/wc.
wc = 0.5; Gd = wc/s;
Obtain the controller using loopsyn.
[K,CL,gamma] = loopsyn(G,Gd); gamma
gamma = 1.1744
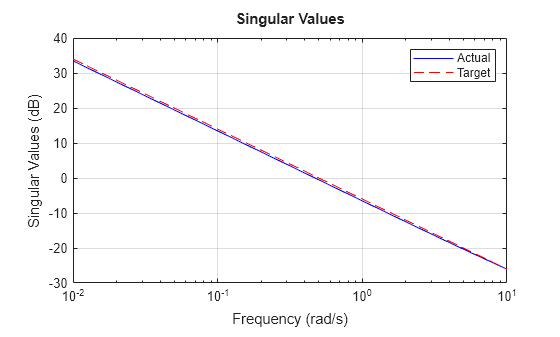
This value of gamma is close to 1, indicating a fairly good match between the achieved loop shape and the target loop shape. Compare the achieved open-loop response G*K with the desired response Gd.
sigma(G*K,"b",Gd,"r--",{0.01,10}) grid on legend("Actual","Target")
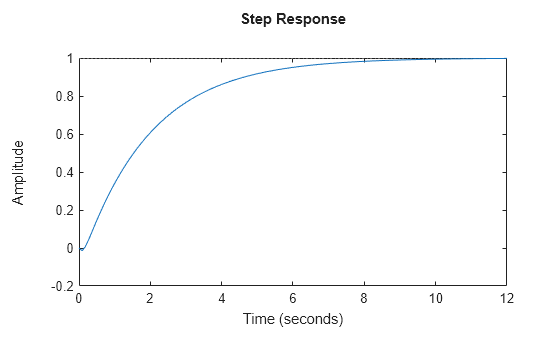
Examine the step response of the closed-loop system.
step(CL)
You can use the input argument alpha to specify how much loopsyn favors either performance (mixsyn design) or robustness (ncfsyn design). By default, loopsyn computes a balanced design, alpha = 0.5. To change the balance, change alpha. Consider the following plant and target loop shape.
G = tf(25,[1 10 10 10]); Gd = tf(0.5,[1 0]);
Design a loop-shaping controller that maximizes performance (minimizes gamma) subject to the constraint that the robustness (as determined by ncfmargin) is no worse than 75% of the maximum achievable robustness. To do so, set alpha to 0.75.
alpha = 0.75; [K,CL,gamma,info] = loopsyn(G,Gd,alpha);
The maximum achievable robustness margin is returned in the info structure. Compare that value to the margin achieved by this controller. For ncfmargin, use the shaped plant and corresponding controller, also returned in info.
info.emax
ans = 0.6474
ncfmargin(info.Gs,info.Ks)
ans = 0.4859
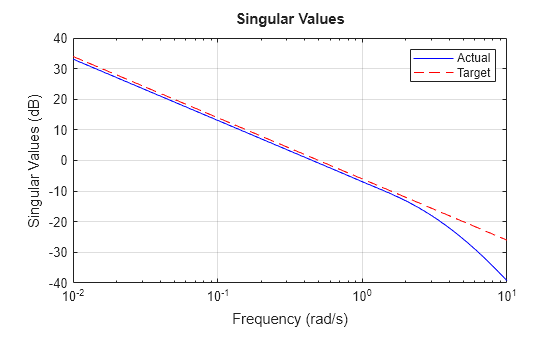
These values confirm that the achieved robustness is 75% of the maximum robustness achievable by setting alpha = 1 for the pure ncfsyn design. For this plant, the alpha = 0.75 design yields a good match to the loop shape without sacrificing much robustness. Examine the performance and loop shape with this controller.
gamma
gamma = 1.2143
sigma(G*K,"b",Gd,"r--",{0.01,10}) grid on legend("Actual","Target")
For details on how to choose a good value of alpha for your application, see Loop-Shaping Controller Design.
When designing a controller for a MIMO system, if you specify a scalar Gd, then loopsyn applies the same target loop shape to all feedback channels. You can specify a different shape for each loop using a diagonal Gd of size Ny-by-Ny, where Ny is the number of feedback loops, or the number of outputs of G. Consider the following control system with a two-output, two-input plant.
s = tf('s');
G = [(1+0.1*s)/(1+s) 0.1/(s+2) ; 0 (s+2)/(s^2+s+3)];Design a controller for this plant such as the first feedback channel has a crossover frequency of 1 rad/s and the second has a crossover frequency of 5 rad/s. To do so, create the loop shapes wc/s for each loop and use the append command to create the diagonal Gd.
wc = [1 5]; Gd = append(wc(1)/s,wc(2)/s);
Design the controller.
[K,CL] = loopsyn(G,Gd);
Compare the achieved loop shapes with the target loop shape.
bodemag(G*K,Gd,{0.1,100})
grid on
legend("Actual","Target")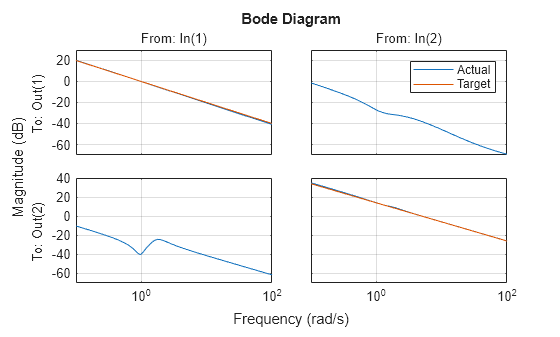
You can limit the order of the controller that loopsyn designs using the order argument. To specify a controller order, you must use a value of the parameter alpha such that 0 < alpha < 1.
Load a two-input, two-output plant.
load plant_loopsynOrderExample.mat G size(G)
State-space model with 2 outputs, 2 inputs, and 7 states.
Design a controller for this plant with loop shape Gd = 0.5/s. Use alpha = 0.5 and let loopsyn select the controller order.
alpha = 0.5; Gd = tf(0.5,[1 0]); [K0,CL0,gamma0] = loopsyn(G,Gd,alpha); order(K0)
ans = 5
loopsyn returns a controller with five states. Use loopsyn again to design a three-state controller.
ord = 3; [K,CL,gamma,info] = loopsyn(G,Gd,alpha,ord); order(K)
ans = 3
For this plant, reducing the controller order from five to three yields a small decrease in performance.
gamma0
gamma0 = 1.0336
gamma
gamma = 1.1828
Use a model-reduction command such as balred to identify suitable target orders to try for ord.
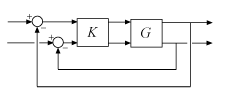
loopsyn can also provide a two-input, one output controller suitable for implementing the two-degree-of-freedom (2-DOF) architecture of the following illustration.
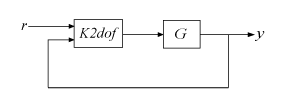
This architecture can be useful for mitigating the derivative kick that can occur when the reference signal changes. To obtain a controller suitable for this implementation, specify a plant and target loop shape, and call loopsyn.
G = tf(8625,[1 2.389 -5606]); Gd = tf(80,[1 0])*tf(240,[1 240]); [K,CL,gamma,info] = loopsyn(G,Gd);
The K2dof field of the info output contains the 2-DOF controller. For a plant with Nu inputs and Ny outputs, K2dof has Nu outputs and 2*Ny inputs. In this example, because G is SISO, K2dof has one output and two inputs.
K2dof = info.K2dof; size(K2dof)
State-space model with 1 outputs, 2 inputs, and 4 states.
To use the controller, create a closed-loop system with the architecture shown previously.
L2dof = G*K2dof;
L2dof.InputName = {'r','y'};
L2dof.OutputName = 'y';
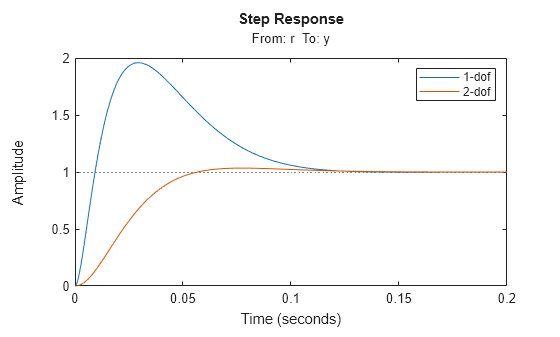
CL2dof = connect(L2dof,'r','y');Compare the closed-loop step response with the two architectures. For this system, the 2-dof architecture substantially reduces the overshoot in the response.
step(CL,CL2dof) legend("1-dof","2-dof")
Input Arguments
Output Arguments
Loop-shaping controller, returned as a state-space (ss) model.
K shapes the open-loop response G*K to
approximately match the specified loop shape Gd. The controller
minimizes the performance gamma subject to the constraint that the
stability margin as computed by ncfmargin does not exceed
alpha*emax, where emax is
the maximum margin achievable by ncfsyn.
Closed-loop system, returned as a state-space (ss) model. The
closed-loop system is given by feedback(G*K,eye(ny)), where
ny is the number of outputs of G.
Controller performance, returned as a nonnegative scalar value or
Inf. A value near or below 1 indicates that G*K
is close to Gd. Values much greater than one indicate a poor match
between the achieved and desired loop shapes. If loopsyn cannot
find a stabilizing controller, gamma is
Inf.
gamma is the mixed-sensitivity performance, the cost function
minimized by mixsyn, and is given by
where W1 and
W3 are the mixsyn
weights. loopsyn derives these weights from Gd
to enforce the desired loop shape.
Additional information about the controller synthesis, returned as a structure containing the following fields.
| Field | Description |
|---|---|
W | Shaping prefilter, returned as a state-space (ss) model.
The value of W is such that the shaped plant Gs =
G*W has the desired loop shape Gd. |
Gs | Shaped plant Gs = G*W, returned as an
ss model. |
Ks | H∞ controller for the shaped
plant Gs (see ncfsyn), returned as an
ss model. For computing the robustness margin with ncfmargin, use
Gs and Ks. |
emax | Maximum achievable robustness margin, returned as a scalar. This value is
the robustness achieved by the pure ncfsyn design. For
information on interpreting this value, see ncfmargin. |
W1,W3 | Weighting functions for the mixsyn formulation of the
loop-shaping goal, returned as ss models.
loopsyn derives these weights from
Gd to enforce the desired loop shape. |
K2dof | Two-degree-of-freedom controller, returned as a
For an example that shows how to use
|
