Node Generation and Deployment
ROS Toolbox enables you to generate C++ and CUDA® code for ROS or ROS 2 nodes, and deploy them to local or remote device targets. For MATLAB® code that contains ROS interfaces, you can generate C++ code and deploy them as ROS or ROS 2 nodes using MATLAB Coder™ (See Generate a Standalone ROS Node). For Simulink® models, you can generate C++ code using Simulink Coder (See Generate Standalone ROS Node from Simulink) or optimized CUDA code using GPU Coder™, and deploy them as ROS or ROS 2 nodes.
Note
Deployment of ROS nodes requires transferring files to the target ROS device through an SSH connection. Ensure that OpenSSH is installed on the target ROS device before deployment.
Categories
- ROS 2 Node Generation and Deployment
Generate C/C++ and CUDA code for ROS 2 nodes and deploy to local and remote hardware
- ROS Node Generation and Deployment
Generate C/C++ and CUDA code for ROS nodes and deploy to local and remote hardware
Featured Examples
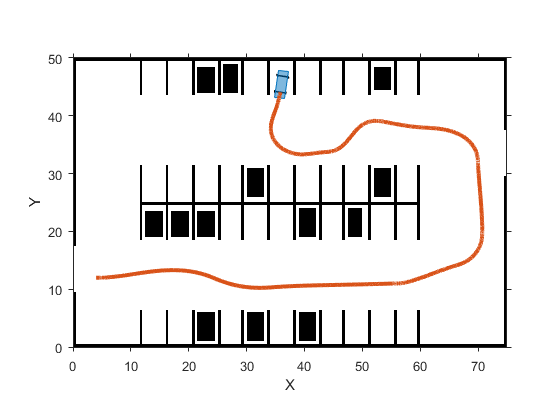
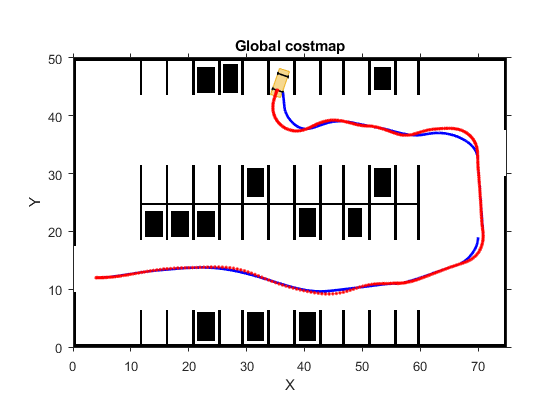
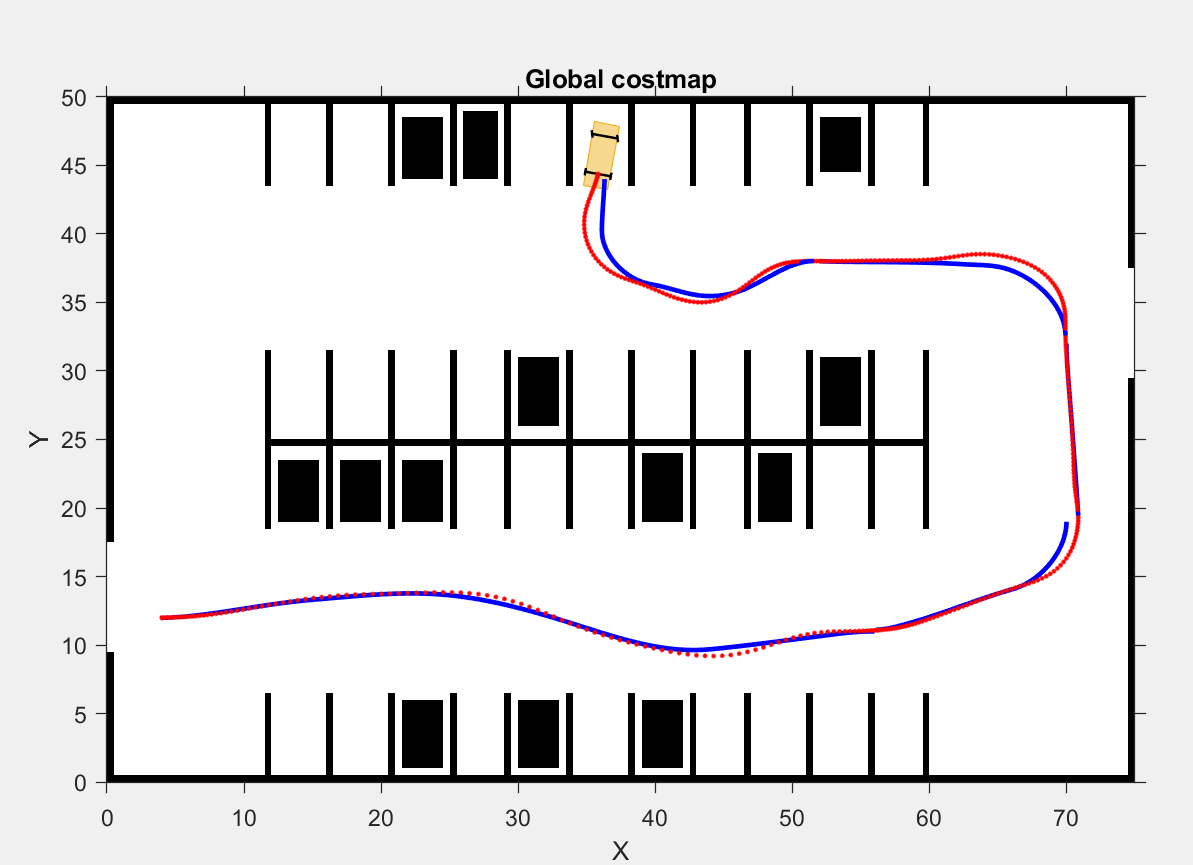
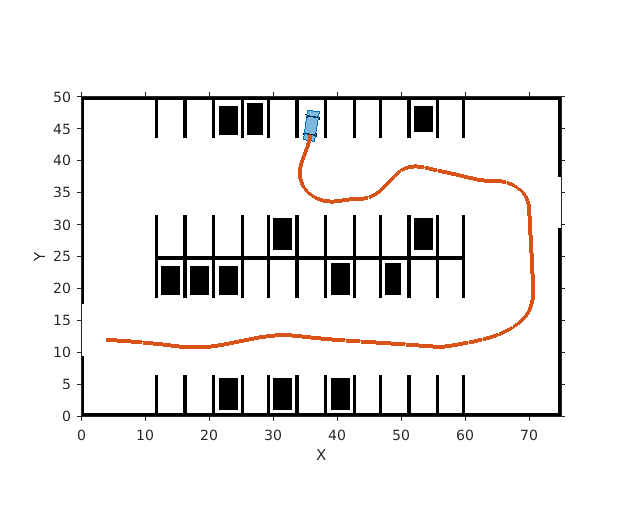
Automated Parking Valet with ROS 2 in MATLAB
Distribute the Automated Parking Valet application among various nodes in a ROS 2 network using MATLAB.
Simulate Automated Parking Valet with ROS 2 in Simulink
Distribute an automated parking valet application among various nodes in a ROS 2 network in Simulink.
Generate and Deploy ROS 2 Nodes for Automated Parking Valet in Simulink
After simulating the ROS 2 nodes to verify all the components of the automated parking valet system as described in Simulate Automated Parking Valet with ROS 2 in Simulink, you can now generate code for those ROS 2 nodes and deploy them. Variant subsystem under each node will use publish and subscribe blocks to replace input and output ports.

Generate CUDA ROS and CUDA ROS 2 Nodes Using MATLAB Coder and GPU Coder
Generate and build CUDA ROS and CUDA ROS 2 nodes from a MATLAB function.
Automated Parking Valet with ROS in MATLAB
Distribute the Automated Parking Valet application among various nodes in a ROS network using MATLAB.
Automated Parking Valet with ROS in Simulink
Distribute an automated parking valet application among various nodes in a ROS network in Simulink.
Generate ROS Node for UAV Waypoint Follower
Use MATLAB code generation to create a ROS node to move a UAV along a predefined circular path and a set of specified custom waypoints.

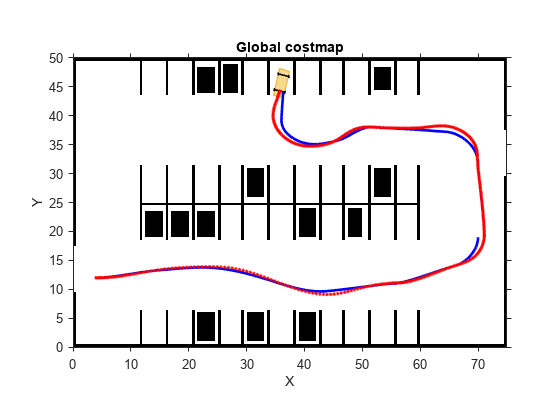
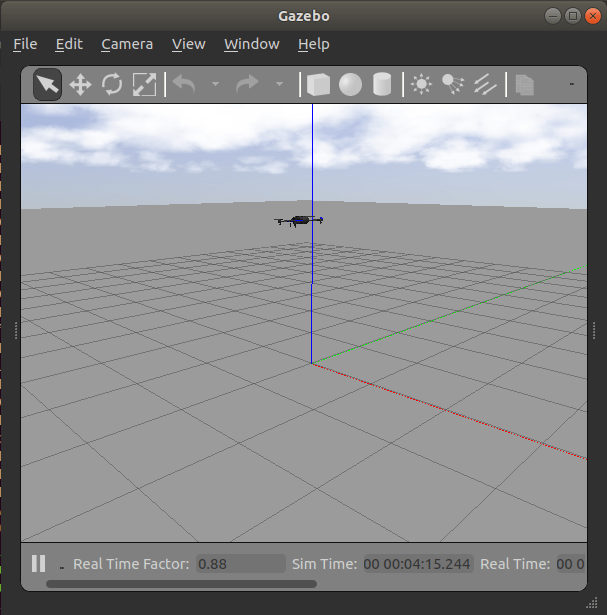
Deploy ROS Node for Sign Following Robot with Time Synchronization Using Simulink
Use Simulink® to generate a ROS stepping enabled node and control a simulated robot running on a separate ROS-based simulator.
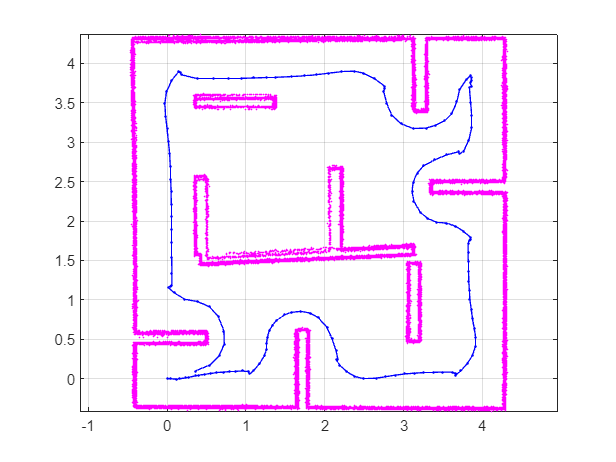
Build a Map Using Lidar SLAM with ROS in MATLAB
Use 2-D lidar data from a simulated robot in Gazebo to build a map.
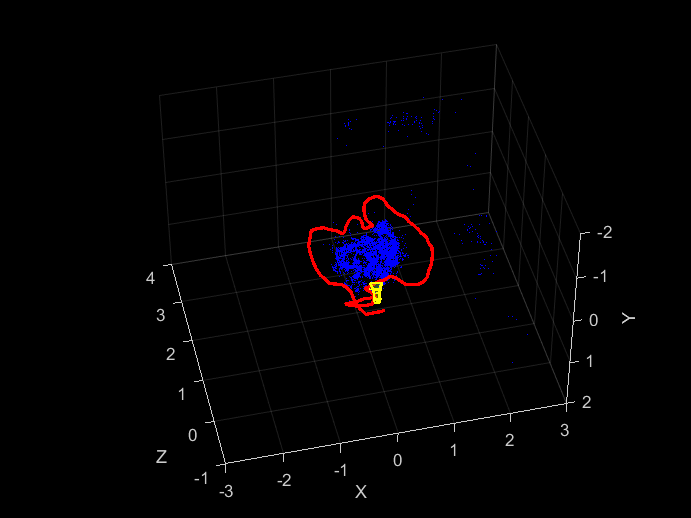
Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
In this example, you implement a visual simultaneous localization and mapping (SLAM) algorithm to estimate the camera poses for the TUM RGB-D Benchmark [1] dataset. You then generate C++ code for the visual SLAM algorithm and deploy it as a ROS node to a remote device using MATLAB®.

Lidar Object Detection in ROS Using PointPillars Deep Learning
Lidar Object Detection In ROS Using PointPillars Deep Learning