Connect to a ROS Network
A ROS network consists of a single ROS master and multiple ROS nodes. The ROS master facilitates the communication in the ROS network by keeping track of all active ROS entities. Every node needs to register with the ROS master to be able to communicate with the rest of the network. MATLAB® can start the ROS master, or the master can be launched outside of MATLAB (for example, on a different computer).
When you work with ROS, you typically follow these steps:
Connect to a ROS network. To connect to a ROS network, you can create the ROS master in MATLAB or connect to an existing ROS master. In both cases, MATLAB will also create and register its own ROS node (called the MATLAB global node) with the master. The
rosinitfunction manages this process.Exchange data. Once connected, MATLAB exchanges data with other ROS nodes through publishers, subscribers, and services.
Disconnect from the ROS network. Call the
rosshutdownfunction to disconnect MATLAB from the ROS network.
This example shows you how to:
Create a ROS master in MATLAB
Connect to an external ROS master
Prerequisites: Get Started with ROS
Create a ROS Master in MATLAB
To create the ROS master in MATLAB, call
rosinitwithout any arguments. This function also creates the global node, which MATLAB uses to communicate with other nodes in the ROS network.
rosinit
Initializing ROS master on http://ah-sradford:62803/. Initializing global node /matlab_global_node_16436 with NodeURI http://ah-sradford:62807/
ROS nodes that are external to MATLAB can now join the ROS network. They can connect to the ROS master in MATLAB by using the hostname or IP address of the MATLAB host computer.
You can shut down the ROS master and the global node by calling rosshutdown.
rosshutdown
Shutting down global node /matlab_global_node_16436 with NodeURI http://ah-sradford:62807/ Shutting down ROS master on http://ah-sradford:62803/.
Connect to an External ROS Master
You can also use the rosinit command to connect to an external ROS master (for example running on a robot or a virtual machine). You can specify the address of the master in two ways: by an IP address or by hostname of the computer that runs the master.
After each call to rosinit, you have to call rosshutdown before calling rosinit with a different syntax. For brevity, these calls to rosshutdown are omitted in these examples.
'master_host' is an example host name and '192.168.1.1' is an example IP address of the external ROS master. Adjust these addresses depending on where the external master resides in your network. These commands will fail if no master is found at the specified addresses.
rosinit('192.168.1.1') rosinit('master_host')
Both calls to rosinit assume that the master accepts network connections on port 11311, which is the standard ROS master port. If the master is running on a different port, you can specify it as a second argument. To connect to a ROS master running on host name master_host and port 12000, use the following command:
rosinit('master_host',12000)
If you know the entire Uniform Resource Identifier (URI) of the master, you can create the global node and connect to this master using this syntax:
rosinit('http://192.168.1.1:12000')
Node Host Specification
In some cases, your computer may be connected to multiple networks and have multiple IP addresses. This illustration shows an example.
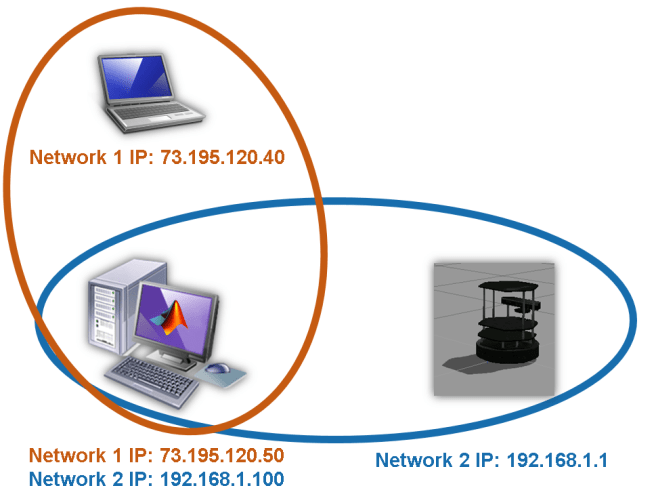
The computer on the bottom left runs MATLAB and is connected to two different networks. In one subnet, its IP address is 73.195.120.50, and in the other, its IP is 192.168.1.100. This computer wants to connect to the ROS master on the TurtleBot® computer at IP address 192.168.1.1. As part of the registration with the master, the MATLAB global node has to specify the IP address or host name where other ROS nodes can reach it. All the nodes on the TurtleBot will use this address to send data to the global node in MATLAB.
When rosinit is invoked with the master's IP address, it tries to detect the network interface used to contact the master and use that as the IP address for the global node. If this automatic detection fails, you can explicitly specify the IP address or host name by using the NodeHost name-value pair in the rosinit call. The NodeHost name-value pair can be used with any of the other syntaxes already shown.
These commands advertise your computer's IP address to the ROS network as 192.168.1.100.
rosinit('192.168.1.1','NodeHost','192.168.1.100') rosinit('http://192.168.1.1:11311','NodeHost','192.168.1.100') rosinit('master_host','NodeHost','192.168.1.100')
Once a node is registered in the ROS network, you can see the address that it advertises by using the command rosnode info <nodename>. You can see the names of all registered nodes by calling rosnode list.
ROS Environment Variables
In advanced use cases, you might want to specify the address of a ROS master and your advertised node address through standard ROS environment variables. The syntaxes that were explained in the previous sections should be sufficient for the majority of your use cases.
If no arguments are provided to rosinit, the function will also check the values of standard ROS environment variables. These variables are ROS_MASTER_URI, ROS_HOSTNAME, and ROS_IP. You can see their current values using the getenv command:
getenv('ROS_MASTER_URI') getenv('ROS_HOSTNAME') getenv('ROS_IP')
You can set these variables using the setenv command. After setting the environment variables, call rosinit with no arguments. The address of the ROS master is specified by ROS_MASTER_URI, and the global node's advertised address is given by ROS_IP or ROS_HOSTNAME. If you specify additional arguments to rosinit, they override the values in the environment variables.
setenv('ROS_MASTER_URI','http://192.168.1.1:11311') setenv('ROS_IP','192.168.1.100') rosinit
You do not have to set both ROS_HOSTNAME and ROS_IP. If both are set, ROS_HOSTNAME takes precedence.
Verify Connection
For your ROS connection to work correctly, you must ensure that all nodes can communicate with the master and with each other. The individual nodes must communicate with the master to register subscribers, publishers, and services. They must also be able to communicate with one another to send and receive data. If your ROS network is not set up correctly, it is possible to be able to send data and be unable to receive data (or vice versa).
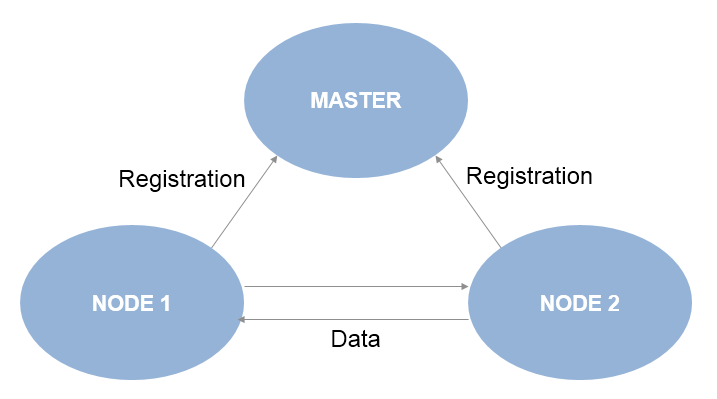
This diagram shows a ROS Network with a single ROS master and two different nodes that register themselves with the master. Each node contacts the master to find the advertised address of the other node in the ROS network. Once each node knows the other node's address, a data exchange can be established without involvement of the master.
Next Steps
See Exchange Data with ROS Publishers and Subscribers to explore publishers and subscribers in ROS.