Transmission Applications
Transmissions are gearboxes that transmit torque from a combustion engine to the rest of the drivetrain at a desired speed. These examples demonstrate building, using, and testing transmissions.
Featured Examples
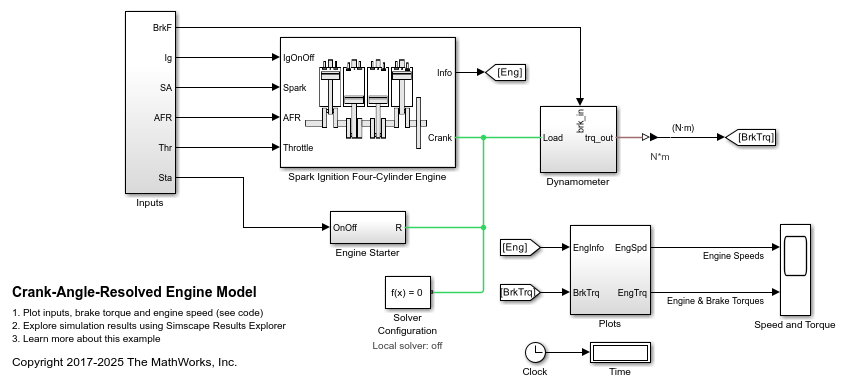
Crank-Angle-Resolved Engine Model
A 2.0-liter, four-cylinder, naturally aspirated, spark-ignited, four-stroke engine which computes crank-angle-resolved instantaneous torque.
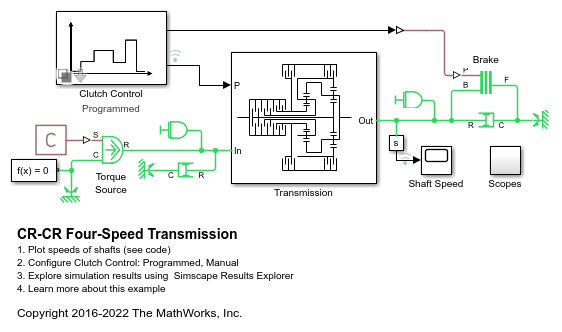
CR-CR Four-Speed Transmission
A four-speed transmission with two planetary gears and five clutches. The test sequence steps through the four forward gear ratios, switches to neutral, and then applies a brake clutch to the output shaft of the transmission.
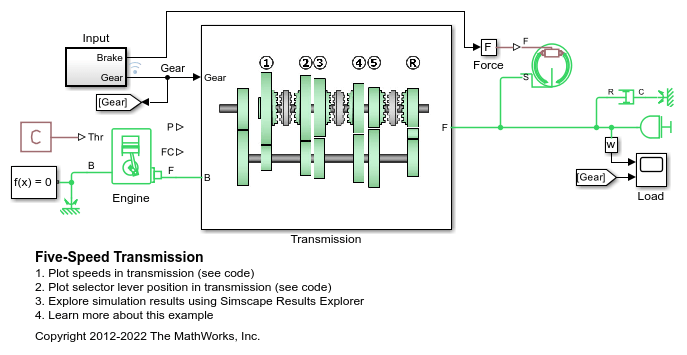
Five-Speed Transmission
A five-speed transmission with a reverse gear. An engine spins the layshaft and the six sets of output gears. To engage the selected gear, ideal actuators move the selector levers connected to the double-sided synchronizers. The position of the selector levers determines which gears are connected to the output shaft.
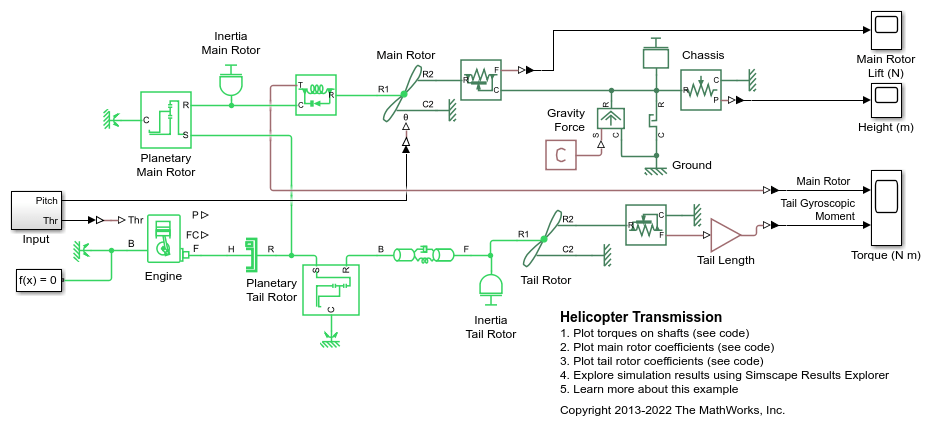
Helicopter Transmission
A fixed helicopter transmission testbed. The gasoline engine provides power that is sent to the main and tail rotors through planetary gearsets. The main rotor shaft is considered rigid, and flexibility is modeled in the longer, thinner tail rotor shaft. Blade pitch angle is set directly via a physical signal. Swash plate dynamics can be added using the appropriate blocks in Simscape™ Fluids™. The engine stalls after six seconds, but lift is maintained for some time through the unidirectional clutch. This scheme also allows autorotation of the main rotor in a descending helicopter.
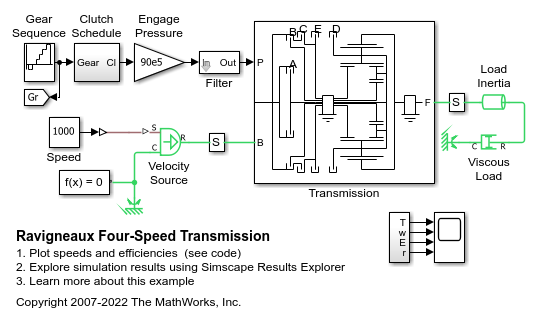
Ravigneaux Four-Speed Transmission
A test harness for a Ravigneaux 4-speed transmission. The subsystem uses the Ravigneaux Gear block and five friction clutches to implement four forward ratios plus reverse. Meshing losses are enabled in the Ravigneaux gear. The clutch states required to implement the different ratios can be viewed by opening the Clutch Schedule block.
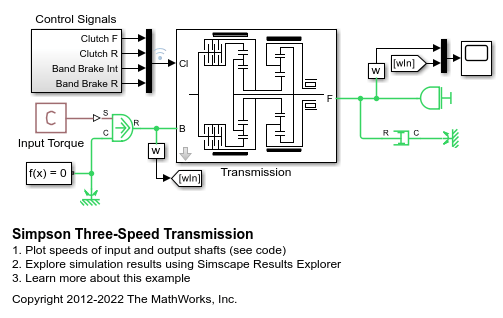
Simpson Three-Speed Transmission
A Simpson transmission with three forward speeds and one reverse speed. Two planetary gear sets are linked with a common sun gear. Two disk friction clutches and two band brakes determine which components can rotate relative to one another which determines the final gear ratio. The Clutch Schedule subsystem shows which clutches and brakes should be locked for each forward or reverse speed.
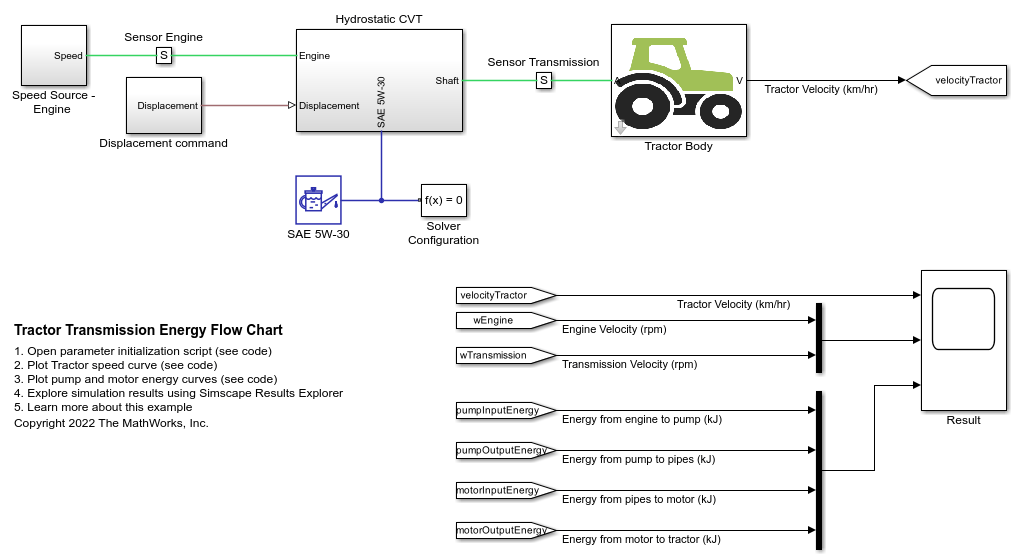
Tractor Transmission Energy Flow Chart
Model, parameterize, and test a tractor with a hydrostatic continuously variable transmission (CVT). When you run one of the plot functions, you can view plots of the tractor velocity, engine speed, transmission speed, and pump and motor energy computations.
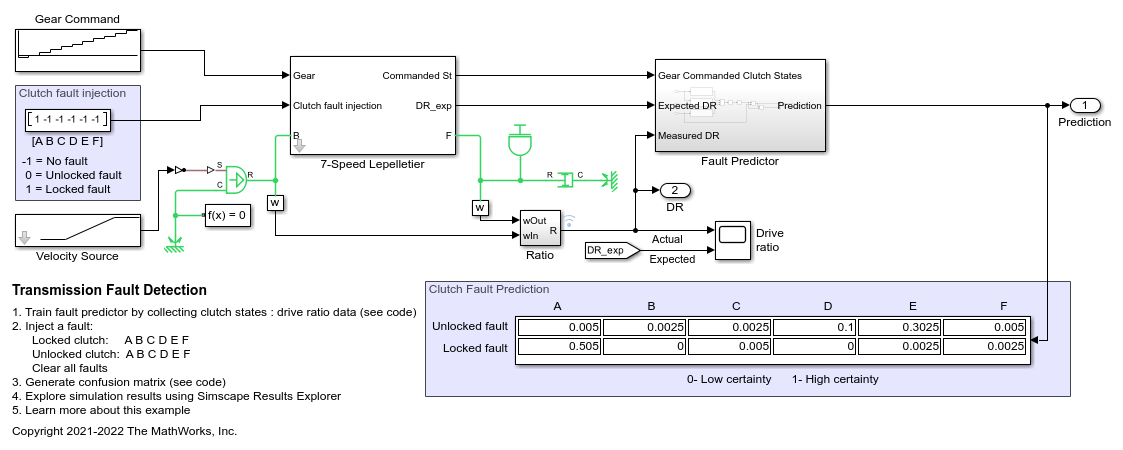
Transmission Fault Detection Harness
Inject stuck-off and stuck-on clutch faults into a transmission system, iterate through failure scenarios to gather synthetic training data sets, apply the data to a basic fault classifier algorithm, and measure the classifier's accuracy. This example uses Fast Restart mode to iterate through many different scenarios without needing to recompile the model in between iterations. This workflow is useful for tuning and testing different transmission fault sensor configurations and detector algorithms.
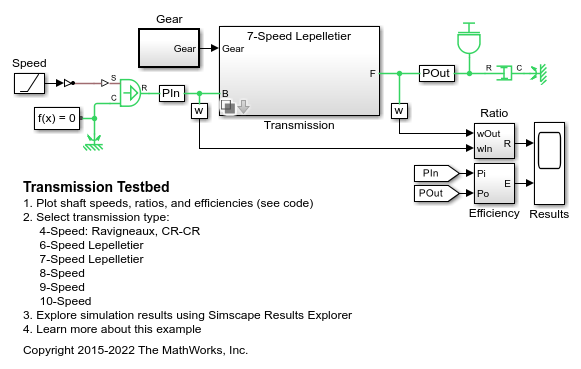
Transmission Testbed
A testbed with interchangeable transmissions. The transmission models vary from classic four speed transmissions to modern seven, eight, nine, and ten speed configurations. The efficiency and drive ratio can be adjusted by varying the components in each individual transmission configuration. The transmission choices are held in a variant subsystem and are selected by either using the hyperlinks in the model or right-clicking the Transmission subsystem, selecting Variant -> Override using, and the desired variant.
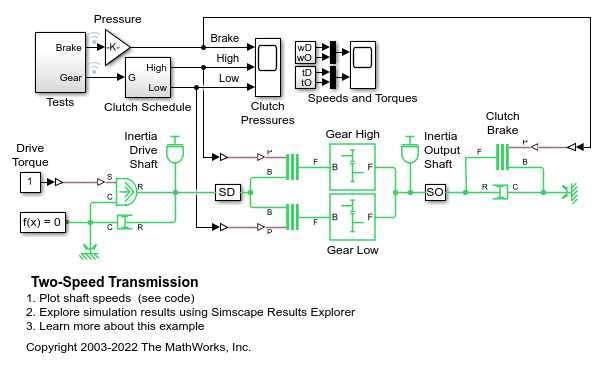
Two-Speed Transmission
A simple two-speed transmission. Two clutches control which gear is selected. A brake is connected to the output shaft and can be controlled independently.
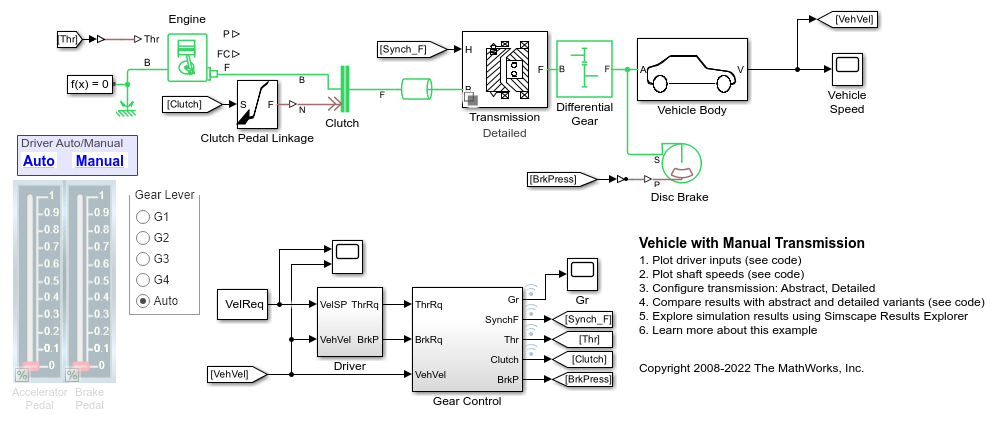
Vehicle with Manual Transmission
A vehicle that has a four-speed manual transmission. The key elements of the transmission are four synchronizers. By engaging or disengaging these synchronizers and associated dog clutches, the transmission provides four ratios 3.581, 2.022, 1.384, and 1, respectively. The synchronizers are modeled using the Cone Clutch and Dog Clutch blocks.