interp
Interpolation — increase sample rate by integer factor
Description
Examples
Interpolate Signal
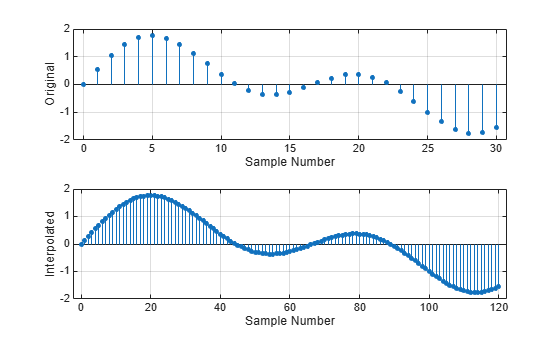
Create a sinusoidal signal sampled at 1 kHz. Interpolate it by a factor of four.
t = 0:1/1e3:1; x = sin(2*pi*30*t) + sin(2*pi*60*t); y = interp(x,4);
Plot the original and interpolated signals.
subplot(2,1,1) stem(0:30,x(1:31),'filled','MarkerSize',3) grid on xlabel('Sample Number') ylabel('Original') subplot(2,1,2) stem(0:120,y(1:121),'filled','MarkerSize',3) grid on xlabel('Sample Number') ylabel('Interpolated')
Input Arguments
Output Arguments
Algorithms
Interpolation increases the original sample rate of a sequence to a higher rate. It is
the opposite of decimation. interp inserts zeros into the original
signal and then applies a lowpass interpolating filter to the expanded sequence. The
function uses the lowpass interpolation algorithm 8.1 described in [1]:
Expand the input vector to the correct length by inserting 0s between the original data values.
Design a special symmetric FIR filter that allows the original data to pass through unchanged and interpolates to minimize the mean-square error between the interpolated points and their ideal values. The filter used by
interpis the same as the filter returned byintfilt.Apply the filter to the expanded input vector to produce the output.
References
[1] Digital Signal Processing Committee of the IEEE Acoustics, Speech, and Signal Processing Society, eds. Programs for Digital Signal Processing. New York: IEEE Press, 1979.
[2] Oetken, G., Thomas W. Parks, and H. W. Schüssler. "New results in the design of digital interpolators." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-23, No. 3, June 1975, pp. 301–309.
Extended Capabilities
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)