Integrator Limited
Integrate signal
Libraries:
Simulink /
Continuous
Description
The Integrator Limited block is identical to the Integrator block with the exception that the output of the block is limited based on the upper and lower saturation limits. See Limiting the Integral for details.
Simulink® treats the Integrator block as a dynamic system with one state. The block dynamics are given by:
where:
u is the block input.
y is the block output.
x is the block state.
x0 is the initial condition of x.
While these equations define an exact relationship in continuous time, Simulink uses numerical approximation methods to evaluate them with finite precision. Simulink can use several different numerical integration methods to compute the output of the block, each with advantages in particular applications. Use the Solver pane of the Configuration Parameters dialog box (see Solver Pane) to select the technique best suited to your application.
The selected solver computes the output of the Integrator block at the current time step, using the current input value and the value of the state at the previous time step. To support this computational model, the Integrator block saves its output at the current time step for use by the solver to compute its output at the next time step. The block also provides the solver with an initial condition for use in computing the block's initial state at the beginning of a simulation. The default value of the initial condition is 0. Use the block parameter dialog box to specify another value for the initial condition or create an initial value input port on the block.
Use the parameter dialog box to:
Define upper and lower limits on the integral
Create an input that resets the block's output (state) to its initial value, depending on how the input changes
Create an optional state output so that the value of the block's output can trigger a block reset
Use the Discrete-Time Integrator block to create a purely discrete system.
Defining Initial Conditions
You can define the initial conditions as a parameter on the block dialog box or input them from an external signal:
To define the initial conditions as a block parameter, specify the Initial condition source parameter as
internaland enter the value in the Initial condition field.To provide the initial conditions from an external source, set the Initial condition source parameter to
external. An additional input port appears on the block.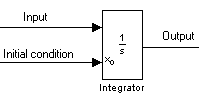
Note
If you select the Limit output parameter, the initial condition must be within the saturation limits. If the initial condition is not within the block saturation limits, the block displays an error message.
Wrapping Cyclic States
Several physical phenomena, such as oscillators and machinery that exhibits rotational movement, are cyclic, periodic, or rotary in nature. Modeling these phenomena in a Simulink block diagram involves integrating the rate of change for the periodic or cyclic signals to obtain the state of the movement. Over long simulation time spans, this approach can result in the states that represent periodic or cyclic signals integrating to large values. Computing trigonometric values, such as sine or cosine, for these signals takes longer as the values become larger due to angle reduction. As the signal values become larger, solver performance and accuracy degrades.
One approach for overcoming this drawback is to reset the angular state to
0 when it reaches 2π (or to –π when it reaches π, for numerical
symmetry). This approach improves the accuracy of sine and cosine computations and reduces
angle reduction time. But it also requires zero-crossing detection and introduces solver
resets, which slow down the simulation for variable step solvers, particularly in large
models.
To eliminate solver resets at wrap points, the Integrator block supports wrapped states that you can enable by checking Wrap state on the block parameter dialog box. When you enable Wrap state, the block icon changes to indicate that the block has wrapping states.

The Integrator block supports wrapping states that are bounded by upper and lower values parameters of the wrapped state. The algorithm for determining wrapping states is given by:
where:
xl is the lower value of the wrapped state.
xu is the upper value of the wrapped state.
y is the output.
The support for wrapping states provides these advantages.
It eliminates simulation instability when your model approaches large angles and large state values.
It reduces the number of solver resets during simulation and eliminates the need for zero-crossing detection, improving simulation time.
It eliminates large angle values, speeding up computation of trigonometric functions on angular states.
It improves solver accuracy and performance and enables unlimited simulation time.
Limiting the Integral
To limit the output signal to a specified range of values, select Limit output and specify the saturation limits. When the output reaches one of the limits, the integral action is disabled to prevent integral wind up. During a simulation, you can change the limits but not whether the output is limited. The block determines output signal value using these criteria:
When the integral value is less than or equal to the lower saturation limit, the output signal value is the lower saturation limit.
When the integral value is between the lower saturation limit and the upper saturation limit, the output is the integral value.
When the integral value is greater than or equal to the upper saturation limit, the output signal value is the upper saturation limit.
To generate a signal that indicates when the state is limited by the saturation limits, select Show saturation port. A second output port appears on the block.
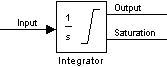
The saturation signal has one of three values:
1— State limited by upper saturation limit0— State not limited–1— State limited by lower saturation limit
When you limit the Integrator block output, the block has three zero crossing signals: one to detect when the integral value exceeds the upper saturation limit, one to detect when the integral value is less than the lower saturation limit, and one to detect when the integral value changes from being saturated to not being saturated.
Note
By default, the Limit output parameter is enabled for the
Integrator Limited block, with the Upper saturation
limit parameter value set to 1, and the
Lower saturation limit parameter value set to
0.
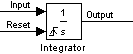
Resetting the State
The block can reset its state to the specified initial condition based on an external signal. To cause the block to reset its state, select one of the External reset choices. A trigger port appears below the block's input port and indicates the trigger type.
Select
risingto reset the state when the reset signal rises from a negative or zero value to a positive value.Select
fallingto reset the state when the reset signal falls from a positive value to a zero or negative value.Select
eitherto reset the state when the reset signal changes from zero to a nonzero value, from a nonzero value to zero, or changes sign.Select
levelto reset the state when the reset signal is nonzero at the current time step or changes from nonzero at the previous time step to zero at the current time step.Select
level holdto reset the state when the reset signal is nonzero at the current time step.
The reset port has direct feedthrough. If the block output feeds back into this port, either directly or through a series of blocks with direct feedthrough, an algebraic loop results (see Algebraic Loop Concepts). Use the Integrator block's state port to feed back the block's output without creating an algebraic loop.
Note
To be compliant with the Motor Industry Software Reliability Association (MISRA™) software standard, your model must use Boolean signals to drive the external reset ports of Integrator blocks.
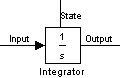
About the State Port
Selecting the Show state port check box on the Integrator block's parameter dialog box causes an additional output port, the state port, to appear at the top of the Integrator block.
The output of the state port is the same as the output of the block's standard output port except for the following case. If the block is reset in the current time step, the output of the state port is the value that would have appeared at the block's standard output if the block had not been reset. The state port's output appears earlier in the time step than the output of the Integrator block's output port. Use the state port to avoid creating algebraic loops in these modeling scenarios:
Systems that use self-resetting integrators
Passing states from one enabled subsystem to another
Note
When updating a model, Simulink checks that the state port applies to one of these two scenarios. If not, an error message appears. Also, you cannot log the output of this port in a referenced model that executes in Accelerator mode. If logging is enabled for the port, Simulink generates a "signal not found" warning during execution of the referenced model.
Specifying the Absolute Tolerance for the Block Outputs
By default Simulink software uses the absolute tolerance value specified in the Configuration Parameters dialog box (see Error Tolerances for Variable-Step Solvers) to compute the output of the Integrator block. If this value does not provide sufficient error control, specify a more appropriate value in the Absolute tolerance field of the Integrator block dialog box. The value that you specify is used to compute all the block outputs.
Examples
When you need an Integrator block to reset based on the block output value, you can use the state port to avoid creating an algebraic loop.
Open the model SelfResettingIntegratorAlgLoop. The Integrator block in the model is configured to reset when the reset signal changes from a positive value to a value of zero or a negative value. The reset signal is created by subtracting the current block output value from 1 so that the block resets itself each time the output value reaches 1.
mdl = "SelfResettingIntegratorAlgLoop";
open_system(mdl)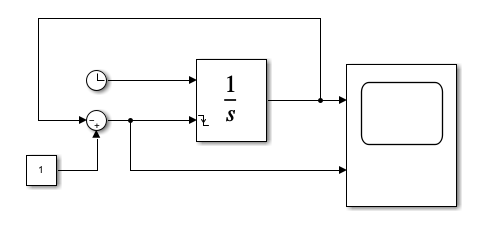
Because the reset port has direct feedthrough, using the output signal to calculate the value of the reset signal creates an algebraic loop. The output signal value depends on the value of the reset signal and vice versa. Because of this mutual dependence, the software cannot calculate either value.
When you try to simulate the model, the software issues diagnostics about the algebraic loop. To see the algebraic loop in the model, use the Simulink.BlockDiagram.getAlgebraicLoops function. The Algebraic Loops viewer opens and shows that the model contains one real algebraic loop.
Simulink.BlockDiagram.getAlgebraicLoops(mdl);
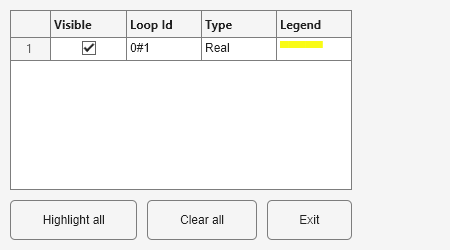
The algebraic loop is highlighted in the model.
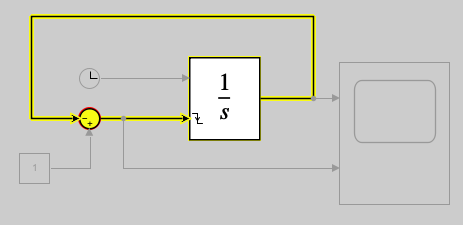
The Integrator block calculates the state value before the output value in each time step. Because the state value is available before the output value, you can use the state value to create a self-resetting Integrator block without creating an algebraic loop.
To see this solution, open the model SelfResettingIntegrator. The Integrator block has the state port enabled. Instead of using the output signal to calculate the value of the reset signal, the model uses the state value.
mdl2 = "SelfResettingIntegrator";
open_system(mdl2)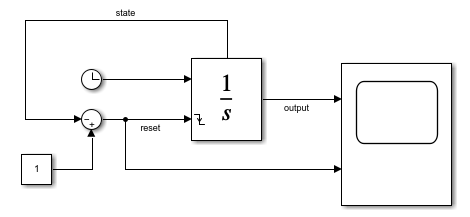
To verify that using the state instead of the output breaks the algebraic loop, call the Simulink.BlockDiagram.getAlgebraicLoops function again.
Simulink.BlockDiagram.getAlgebraicLoops(mdl2);
No algebraic loops were found.
To see the self-resetting Integrator in action, simulate the model.
simOut = sim(mdl2);
To view the output and reset signals in the Scope, double-click the Scope block. The Integrator block output signal oscillates between a value of 0 and 1. The output value resets to 0 each time the reset signal value is 0.

You can use the state port to prevent creating an algebraic loop when you need an Integrator block in one enabled subsystem to use the state of an Integrator block in another enabled subsystem.
Open the model EnabledSubsystemStatesAlgLoop.
mdl = "EnabledSubsystemStatesAlgLoop";
open_system(mdl)The model contains two enabled subsystems, named A and B. A Pulse block provides the enable signal for both subsystems, but a Logical Operator block inverts the pulse to create the enable signal for subsystem A. As a result, the execution of the enabled subsystems alternates between subsystem A and subsystem B as the value of the Pulse block output changes.
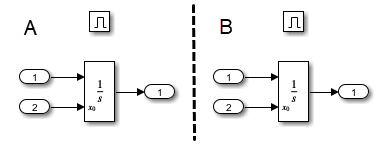
Each enabled subsystem contains an Integrator block. To allow for continual integration of the input signal while execution alternates between the subsystems:
The Enable block in each subsystem is configured to reset the subsystem states each time the subsystem executes.
The Integrator block in each subsystem receives the initial state value through an input port that is connected to the output of the Integrator block in the other subsystem.
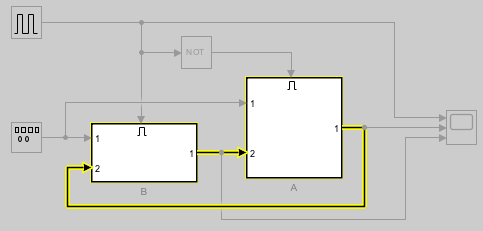
Connecting the output of one Integrator block to the input of the other creates an algebraic loop. To compute the output value from subsystem B, the solver needs the output from subsystem A and vice versa. To see the loop in the model, use the Simulink.BlockDiagram.getAlgebraicLoops function. The Algebraic Loops viewer opens and shows that the model contains one real algebraic loop.
Simulink.BlockDiagram.getAlgebraicLoops(mdl);
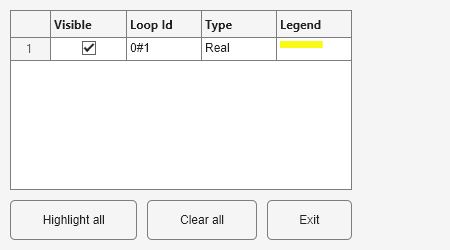
The algebraic loop is highlighted in the model.
If you try to simulate the model, the simulation issues an error during the initialization phase.
out = sim(mdl,CaptureErrors="on");
execinfo = out.SimulationMetadata.ExecutionInfo;
stopreason = execinfo.StopEventDescriptionstopreason = 'Error due to multiple causes.'
errphase = execinfo.ErrorDiagnostic.SimulationPhase
errphase = 'Initialization'
sldiagviewer.reportSimulationMetadataDiagnostics(out)
To pass states between the enabled subsystems without creating an algebraic loop, use the state port of the Integrator block. The solver computes the block state value at an earlier point in each time step, so the output for subsystem B no longer depends on the output from subsystem A and vice versa.
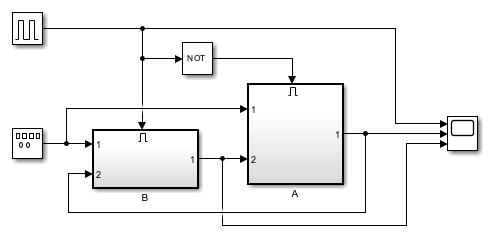
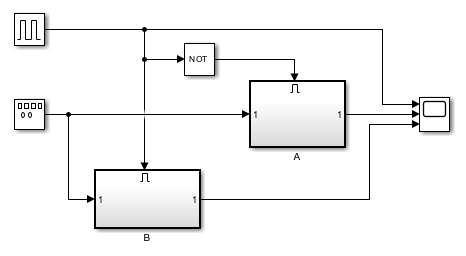
To see this solution, open the model EnabledSubsystemStates.
mdl2 = "EnabledSubsystemStates";
open_system(mdl2)The input, enable, and output signals are the same, but the output from subsystem A no longer acts as a second input for subsystem B and vice versa.
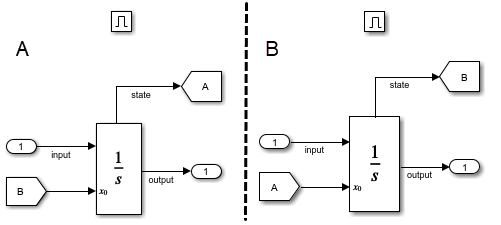
To pass the states between the enabled subsystems:
Each Integrator block is configured to show the state port.
GoTo and From blocks with global visibility connect the state port of the Integrator block in subsystem A to the initial condition port of the Integrator block in subsystem B and vice versa.
The software does not support connecting the state port of an Integrator block to an output port of an enabled subsystem.
To verify that using the state port resolved the algebraic loop, use the Simulink.BlockDiagram.getAlgebraicLoops function.
Simulink.BlockDiagram.getAlgebraicLoops(mdl2);
No algebraic loops were found.
Simulate the model.
out = sim(mdl2);
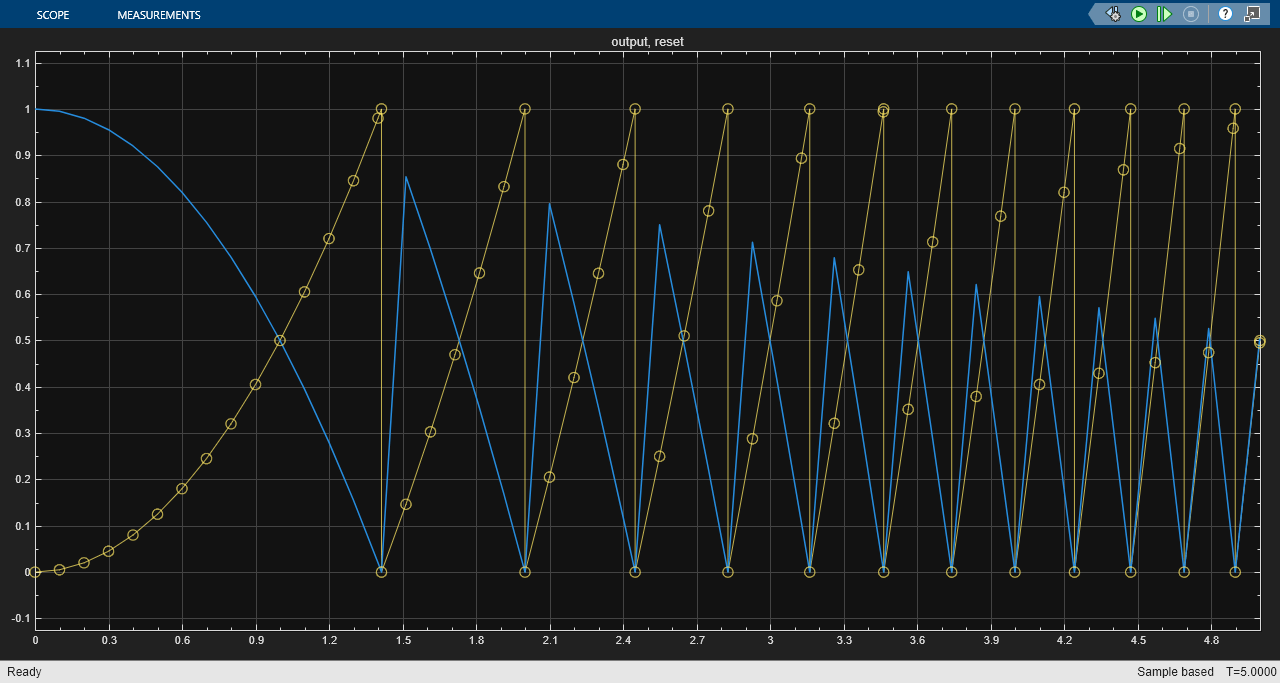
To view the results, double-click the Scope block. Alternatively, open the Scope window by calling the open_system function. The Scope window displays the enable signal and the output signals from each subsystem.
blk = mdl2 + "/Scope";
open_system(blk)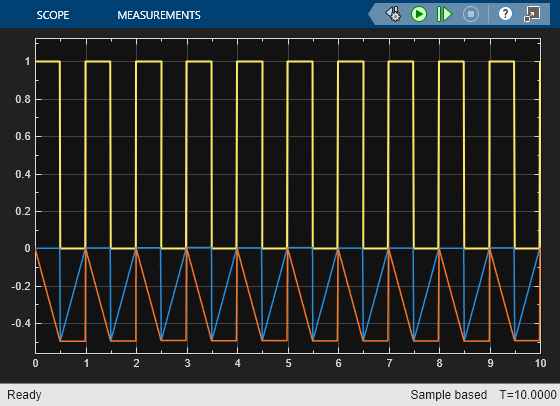
For another example of a system that passes Integrator state values between enabled subsystems, see Building a Clutch Lock-Up Model.
Extended Examples

Automotive Suspension
Model a simplified half-car system that includes independent front and rear vertical suspensions. The model also incorporates body pitch and bounce degrees of freedom. The example provides a description of the model to demonstrate how simulation can be used to investigate ride characteristics. You can use this model in conjunction with a powertrain simulation to study longitudinal shuffle resulting from changes in throttle setting.
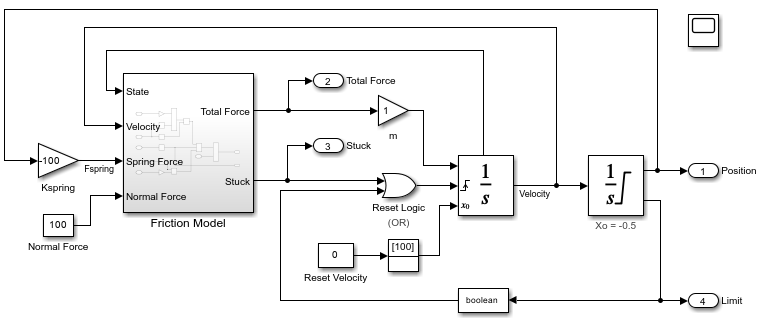
Model Stick-Slip Friction and Hard Stops in Mass-Spring-Damper System
One way you can incorporate hard stops and friction changes from stick-slip motion into a mass-spring-damper model.
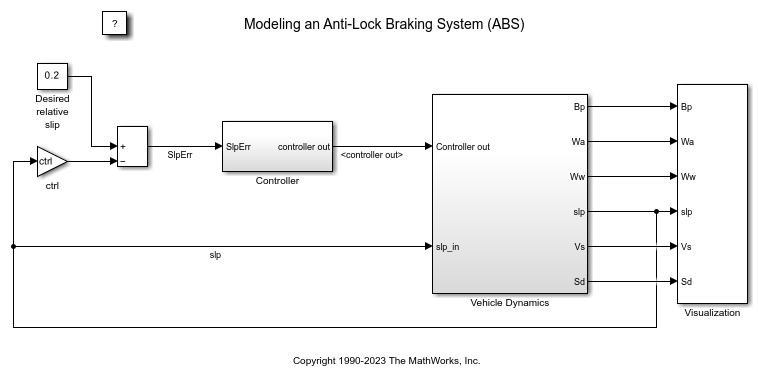
Model an Anti-Lock Braking System
Model a simple Anti-Lock Braking System (ABS). The model simulates the dynamic behavior of a vehicle under hard braking conditions. The model represents a single wheel, which may be replicated a number of times to create a model for a multi-wheel vehicle.
Ports
Input
Output
Parameters
Block Characteristics
Extended Capabilities
Version History
Introduced before R2006a