Deploy PX4 on Host Computer with PX4 Host Target (PX4 Software-in-the-loop or SITL)
Learn how to deploy PX4 on host computer with PX4 Host Target (PX4 Software-in-the-loop or SITL) and control the vehicle.
Topics
- Deployment and Verification Using PX4 Host Target and jMAVSim/Simulink
Deploy flight control algorithms created in Simulink® on PX4® Host Target and control the vehicle using jMAVSim/Simulink visualizer.
- Integrate Simulator Plant Model Containing MAVLink Blocks with Flight Controller Running on PX4 Host Target
Run Controller model and Simulator Plant model using lockstep simulation.
Featured Examples
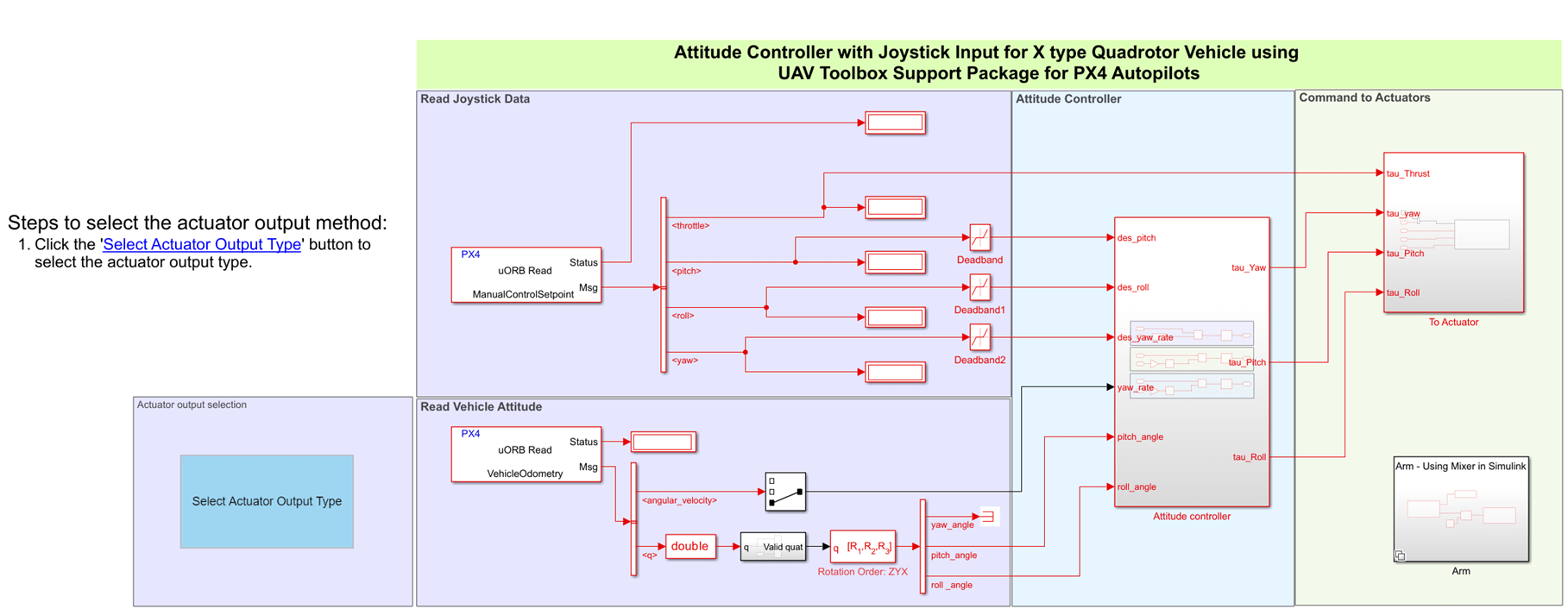
Attitude Control for X-Configuration Quadcopter Using External Input
Use the UAV Toolbox Support Package for PX4® Autopilots to design an attitude controller for an X-configuration quadcopter that uses input from a joystick or radio control transmitter. In this example, you also verify the controller design using PX4 Host Target and SIH in Host Target simulator.
Design and Tune Quadcopter Position Controller for PX4 Autopilot
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller for a quadcopter.
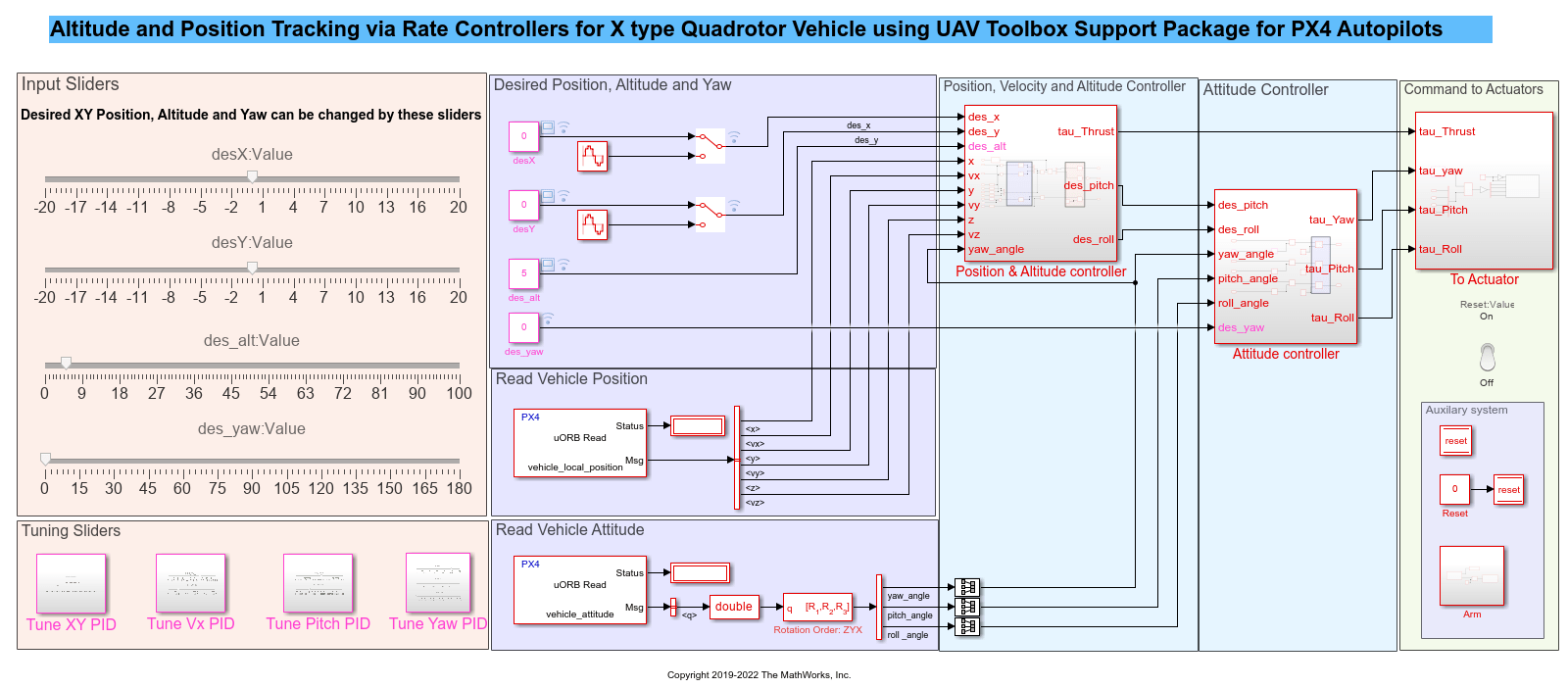
Position Tracking for X-Configuration Quadcopter Using Rate Controller
Use the UAV Toolbox Support Package for PX4® Autopilots to design a position controller using rate control for an X-configuration quadcopter. In this example, you also verify the controller design using the PX4 Host Target and jMAVSim simulator.
Run PX4 Software-in-the-Loop Simulation with Quadcopter Plant in Simulink
Use the UAV Toolbox Support Package for PX4 Autopilots to verify a quadcopter controller design by using Software-in-the-Loop (SITL) simulation and simulating the quadcopter plant model in Simulink.

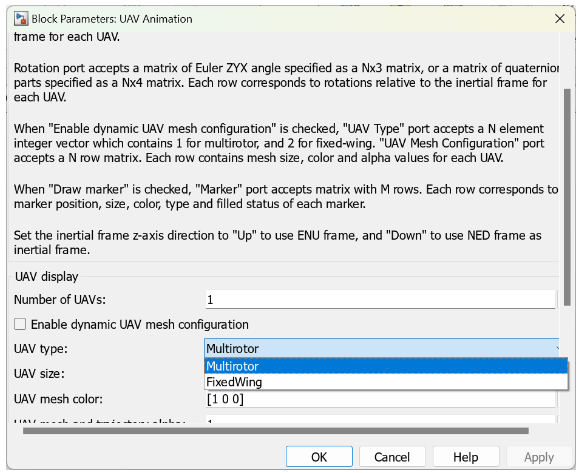
Simulate Manual Control for Fixed-Wing with PX4 Host Target
Use the UAV Toolbox Support Package for PX4® Autopilots to take manual control inputs from Joystick / RC Transmitter and control the fixed-wing flight.
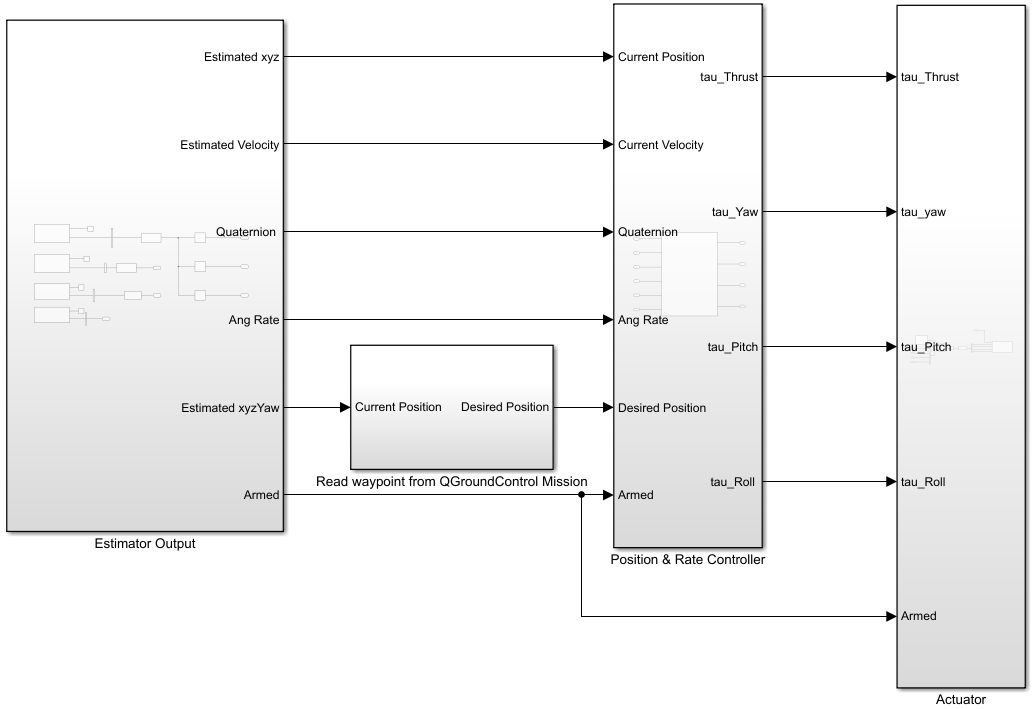
Visualize 3D Scenarios in Unreal Engine with PX4 Host Target Simulation
Use the UAV Toolbox Support Package for PX4® Autopilots to demonstrate 3D scenario Simulation with PX4 Host Target Simulation. For visualization, you can use this example model along with other models running in Simulation-In-Hardware (SIH). This example is compatible with all existing SITL examples.