fixedwing
Guidance model for fixed-wing UAVs
Description
A fixedwing object represents a reduced-order guidance model
[1] for an unmanned aerial
vehicle (UAV). The model approximates the behavior of a closed-loop system consisting of an
autopilot controller and a fixed-wing kinematic model for 3-D motion.
For multirotor UAVs, see multirotor.
Creation
model = fixedwing creates a fixed-wing motion model with
double precision values for inputs, outputs, and configuration parameters
of the guidance model.
model = fixedwing(DataType) specifies the data type precision
(DataType property) for the inputs, outputs, and configurations
parameters of the guidance model.
Properties
Object Functions
control | Control commands for UAV |
derivative | Time derivative of UAV states |
environment | Environmental inputs for UAV |
state | UAV state vector |
Examples
This example shows how to use the fixedwing guidance model to simulate the change in state of a UAV due to a command input.
Create the fixed-wing guidance model.
model = fixedwing;
Set the air speed of the vehicle by modifying the structure from the state function.
s = state(model);
s(4) = 5; % 5 m/sSpecify a control command, u, that maintains the air speed and gives a roll angle of pi/12.
u = control(model); u.RollAngle = pi/12; u.AirSpeed = 5;
Create a default environment without wind.
e = environment(model);
Compute the time derivative of the state given the current state, control command, and environment.
sdot = derivative(model,s,u,e);
Simulate the UAV state using ode45 integration. The y field outputs the fixed-wing UAV states based on this simulation.
simOut = ode45(@(~,x)derivative(model,x,u,e), [0 50], s); size(simOut.y)
ans = 1×2
8 904
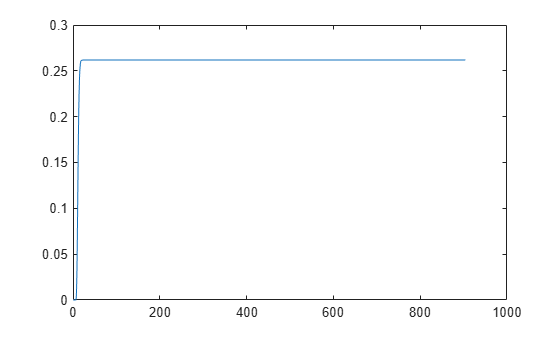
Plot the change in roll angle based on the simulation output. The roll angle is the 7th row of the simOut.y output.
plot(simOut.y(7,:))
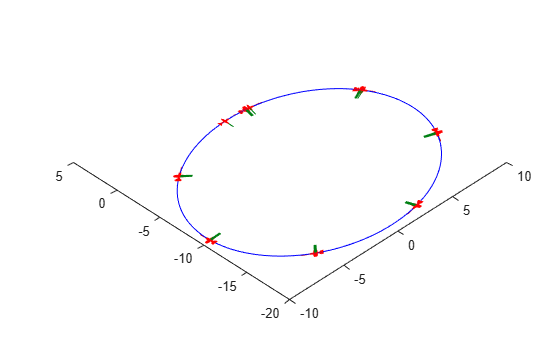
You can also plot the fixed-wing trajectory using plotTransforms. Create the translation and rotation vectors from the simulated state. Downsample (every 30th element) and transpose the simOut elements, and convert the Euler angles to quaternions. Specify the mesh as the fixedwing.stl file and the positive Z-direction as "down". The displayed view shows the UAV making a constant turn based on the constant roll angle.
downsample = 1:30:size(simOut.y,2); translations = simOut.y(1:3,downsample)'; % xyz-position rotations = eul2quat([simOut.y(5,downsample)',simOut.y(6,downsample)',simOut.y(7,downsample)']); % ZYX Euler plotTransforms(translations,rotations,... 'MeshFilePath','fixedwing.stl','InertialZDirection',"down") hold on plot3(simOut.y(1,:),-simOut.y(2,:),simOut.y(3,:),'--b') % full path xlim([-10.0 10.0]) ylim([-20.0 5.0]) zlim([-0.5 4.00]) view([-45 90]) hold off
More About
References
[1] Randal W. Beard and Timothy W. McLain. "Chapter 9." Small Unmanned Aircraft Theory and Practice, NJ: Princeton University Press, 2012.
Extended Capabilities
Version History
Introduced in R2018b