polynomialTrajectory
Description
The polynomialTrajectory
System object™ generates trajectories using a specified piecewise polynomial.
You can create a piecewise-polynomial structure using trajectory
generators like minjerkpolytraj, and
minsnappolytraj, as
well as any custom trajectory generator. You can then pass the structure to the
polynomialTrajectory
System object to create a trajectory interface for scenario simulation using the uavScenario object.
You can use the polynomialTrajectory object to specify the trajectory for
uavPlatform
motion.
To generate a trajectory from a piecewise polynomial:
Create the
polynomialTrajectoryobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
Input Arguments
Properties
Usage
Description
[
outputs a frame of trajectory data based on specified creation arguments and properties.
The trajectory returns position,orientation,velocity,acceleration,angularVelocity] = trajectory()NaN for positions and orientations outside the
range of the time of arrival.
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
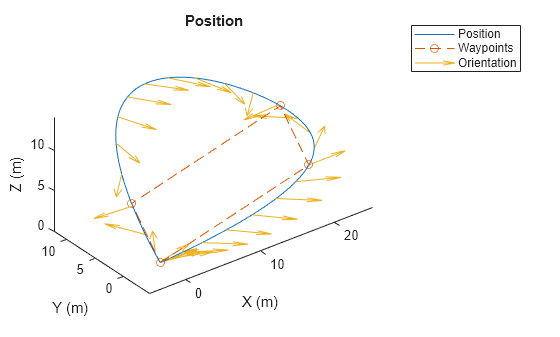
Use the minjerkpolytraj function to generate the piecewise polynomial and the time samples for the specified waypoints of a trajectory.
waypoints = [0 20 20 0 0; 0 0 5 5 0; 0 5 10 5 0]; timePoints = cumsum([0 10 1.25*pi 10 1.25*pi]); numSamples = 100; [~,~,~,~,pp,~,tsamples] = minjerkpolytraj(waypoints,timePoints,numSamples);
Use the polynomialTrajectory System object™ to generate a trajectory from the piecewise polynomial that a multirotor must follow. Specify the sample rate of the trajectory and the orientation at each waypoint.
eulerAngles = [0 0 0; 0 0 0; 180 0 0; 180 0 0; 0 0 0]; q = quaternion(eulerAngles,"eulerd","ZYX","frame"); traj = polynomialTrajectory(pp,SampleRate=100,Orientation=q);
Inspect the waypoints, times of arrival, and orientation by using waypointInfo.
waypointInfo(traj)
ans=5×3 table
TimeOfArrival Waypoints Orientation
_____________ ________________________________________ ________________
0 0 0 0 {1×1 quaternion}
10 20 0 5 {1×1 quaternion}
13.927 20 5 10 {1×1 quaternion}
23.927 0 5 5 {1×1 quaternion}
27.854 6.8667e-14 -1.1458e-13 -8.793e-14 {1×1 quaternion}
Obtain pose information one buffer frame at a time.
[pos,orient,vel,acc,angvel] = traj(); i = 1; spf = traj.SamplesPerFrame; while ~isDone(traj) idx = (i+1):(i+spf); [pos(idx,:),orient(idx,:), ... vel(idx,:),acc(idx,:),angvel(idx,:)] = traj(); i = i + spf; end
Get the yaw angle from the orientation.
eulOrientation = quat2eul(orient); yawAngle = eulOrientation(:,1);
Plot the generated positions and orientations, as well as the specified waypoints.
plot3(pos(:,1),pos(:,2),pos(:,3), ... waypoints(1,:),waypoints(2,:),waypoints(3,:),"--o") hold on % Plot the yaw using quiver. quiverIdx = 1:100:length(pos); quiver3(pos(quiverIdx,1),pos(quiverIdx,2),pos(quiverIdx,3), ... cos(yawAngle(quiverIdx)),sin(yawAngle(quiverIdx)), ... zeros(numel(quiverIdx),1)) title("Position") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Position","Waypoints","Orientation"}) axis equal hold off
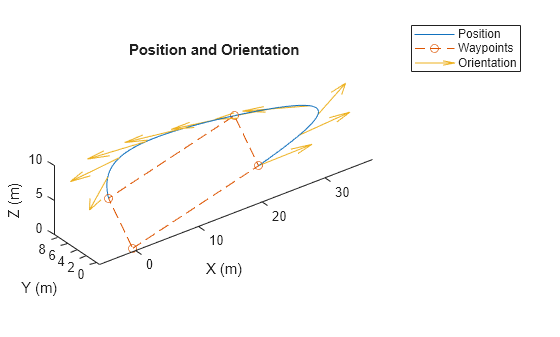
Use the minsnappolytraj function to generate the piecewise polynomial and the time samples for the specified waypoints of a trajectory.
waypoints = [0 20 20 0 0; 0 0 5 5 0; 0 5 10 5 0]; timePoints = linspace(0,30,5); numSamples = 100; [~,~,~,~,~,pp,~,~] = minsnappolytraj(waypoints,timePoints,numSamples);
Use the polynomialTrajectory System object™ to generate a trajectory from the piecewise polynomial. Specify the sample rate of the trajectory.
traj = polynomialTrajectory(pp,SampleRate=100);
Inspect the waypoints and times of arrival by using waypointInfo.
waypointInfo(traj)
ans=5×2 table
TimeOfArrival Waypoints
_____________ ________________________________________
0 0 0 0
7.5 20 0 5
15 20 5 10
22.5 0 5 5
30 2.4897e-13 -2.7471e-12 -2.6352e-12
Obtain the time of arrival between the second and fourth waypoint. Create timestamps to sample the trajectory.
t0 = traj.TimeOfArrival(2); tf = traj.TimeOfArrival(4); sampleTimes = linspace(t0,tf,1000);
Obtain the position, orientation, velocity, and acceleration information at the sampled timestamps using the lookupPose object function.
[pos,orient,vel,accel,~] = lookupPose(traj,sampleTimes);
Get the yaw angle from the orientation.
eulOrientation = quat2eul(orient); yawAngle = eulOrientation(:,1);
Plot the generated positions and orientations, as well as the specified waypoints.
plot3(pos(:,1),pos(:,2),pos(:,3), ... waypoints(1,:),waypoints(2,:),waypoints(3,:),"--o") hold on % Plot the yaw using quiver. quiverIdx = 1:100:length(pos); quiver3(pos(quiverIdx,1),pos(quiverIdx,2),pos(quiverIdx,3), ... cos(yawAngle(quiverIdx)),sin(yawAngle(quiverIdx)), ... zeros(numel(quiverIdx),1)) title("Position and Orientation") xlabel("X (m)") ylabel("Y (m)") zlabel("Z (m)") legend({"Position","Waypoints","Orientation"}) axis equal hold off
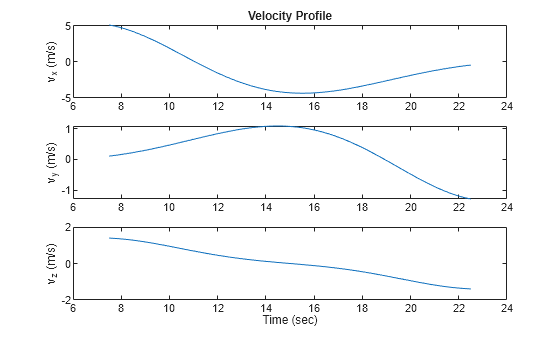
Plot the velocity profiles.
figure subplot(3,1,1) plot(sampleTimes,vel(:,1)) title("Velocity Profile") ylabel("v_x (m/s)") subplot(3,1,2) plot(sampleTimes,vel(:,2)) ylabel("v_y (m/s)") subplot(3,1,3) plot(sampleTimes,vel(:,3)) ylabel("v_z (m/s)") xlabel("Time (sec)")
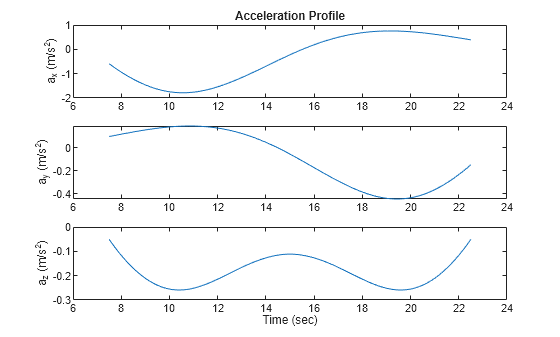
Plot the acceleration profiles.
figure subplot(3,1,1) plot(sampleTimes,accel(:,1)) title("Acceleration Profile") ylabel("a_x (m/s^2)") subplot(3,1,2) plot(sampleTimes,accel(:,2)) ylabel("a_y (m/s^2)") subplot(3,1,3) plot(sampleTimes,accel(:,3)) ylabel("a_z (m/s^2)") xlabel("Time (sec)")
Extended Capabilities
Version History
Introduced in R2023a