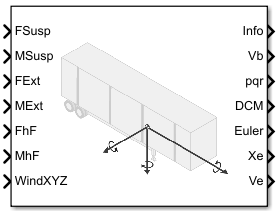
Trailer Body 6DOF
Trailer body with translational and rotational motion
Libraries:
Vehicle Dynamics Blockset /
Vehicle Body
Description
The Trailer Body 6DOF block implements a rigid one-axle, two-axle or three-axle trailer body model that calculates longitudinal, lateral, vertical, pitch, roll, and yaw motion. The block accounts for body mass, inertia, aerodynamic drag, road incline, and weight distribution between the axle hard-point locations due to suspension and external forces and moments.
Use the Inertial Loads parameters to analyze the trailer dynamics under different loading conditions. To specify the number of trailer axles, use the Number of axles parameter.
To create additional input ports, under Input signals, select these block parameters.
Parameter | Input Port | Description |
|---|---|---|
| Rear hitch forces | Fh | Hitch force applied to the body at the rear hitch location, Fhx, Fhy, and Fhz, in the vehicle-fixed frame |
| Rear hitch moments | Mh | Hitch moment at the rear hitch location, Mhx, Mhy, and Mhz, about the vehicle-fixed frame |
Inertial Loads
To analyze the vehicle dynamics under different loading conditions, use the Inertial Loads parameters. You can specify these loads:
Front end
Overhead
Front left and front right
Rear left and rear right
Rear end
For each of the loads, you can specify the mass, location, and inertia.
The illustrations provide the load locations and vehicle parameter dimensions. The table provides the corresponding location parameter sign settings.
This table summarizes the parameter settings that specify the load locations indicated by the dots. For the location, the block uses this distance vector:
Front axle to load, along the vehicle-fixed x-axis
Vehicle centerline to load, along the vehicle-fixed y-axis
Front axle to load, along the vehicle-fixed z-axis
Load | Parameter | Example Location |
|---|---|---|
Front end | Distance vector from front axle, z1R |
|
Overhead | Distance vector from front axle, z2R |
|
Front left | Distance vector from front axle, z3R |
|
Front right | Distance vector from front axle, z4R |
|
Rear left | Distance vector from front axle, z5R |
|
Rear right | Distance vector from front axle, z6R |
|
Rear end | Distance vector from front axle, z7R |
|
Equations of Motion
To determine the vehicle motion, the block implements calculations for the rigid body vehicle dynamics, wind drag, inertial loads, and coordinate transformations.
The block considers the rotation of a vehicle-fixed coordinate frame about a flat earth-fixed inertial reference frame. The origin of the vehicle-fixed coordinate frame is the center of gravity of the sprung mass.
The block uses this equation to calculate the translational motion of the vehicle-fixed coordinate frame, where the applied forces [Fx Fy Fz]T are in the vehicle-fixed frame, and the mass of the body, m, is assumed to be constant.
To determine the relationship between the vehicle-fixed angular velocity vector, [p q r]T, and the rate of change of the Euler angles, , the block resolves the Euler rates into the vehicle-fixed frame.
Inverting J gives the required relationship to determine the Euler rate vector.
The applied forces and moments are the sum of the drag, gravitational, external, and suspension forces.
| Calculation | Implementation |
|---|---|
Load masses and inertias | The block uses the parallel axis theorem to resolve the individual load masses and inertias with the vehicle mass and inertia. |
Gravitational forces, Fg | The block uses the direction cosine matrix (DCM) to transform the gravitational vector in the inertial-fixed frame to the vehicle-fixed frame. |
Drag forces, Fd, and moments, Md | To determine a relative airspeed, the block subtracts the wind speed from the vehicle center of mass (CM) velocity. Using the relative airspeed, the block determines the drag forces. Using the relative airspeed, the block determines the drag moments. |
External forces, Fin, and moments, Min | The external forces and moments are input via ports FExt and MExt. |
Suspension forces and moments | The block assumes that the suspension forces and moments act on these hardpoint locations:
|
The equations use these variables.
Vehicle CM displacement, velocity, and acceleration along the vehicle-fixed x-axis | |
Vehicle CM displacement, velocity, and acceleration along the vehicle-fixed y-axis | |
Vehicle CM displacement, velocity, and acceleration along the vehicle-fixed z-axis | |
φ | Rotation of the vehicle-fixed frame about the earth-fixed X-axis (roll) |
θ | Rotation of the vehicle-fixed frame about the earth-fixed Y-axis (pitch) |
ψ | Rotation of the vehicle-fixed frame about the earth-fixed Z-axis (yaw) |
| FFLx, FFLy, FFLz | Suspension forces applied to the front left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FFRx, FFRy, FFRz | Suspension forces applied to the front right hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FMLx, FMLy, FMLz | Suspension forces applied to the middle left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FMRx, FMRy, FMRz | Suspension forces applied to the middle right hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FRLx, FRLy, FRLz | Suspension forces applied to the rear left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FRRx, FRRy, FRRz | Suspension forces applied to the rear right hardpoint along the vehicle-fixed x-, y-, and z-axes |
| MFLx, MFLy, MFLz | Suspension moment applied to the front left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MFRx, MFRy, MFRz | Suspension moment applied to the front right hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MMLx, MMLy, MMLz | Suspension moment applied to the middle left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MMRx, MMRy, MMRz | Suspension moment applied to the middle right hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MRLx, MRLy, MRLz | Suspension moment applied to the rear left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MRRx, MRRy, MRRz | Suspension moment applied to the rear right hardpoint about the vehicle-fixed x-, y-, and z-axes |
| Fextx, Fexty, Fextz | External forces applied to the vehicle CM along the vehicle-fixed x-, y-, and z-axes |
| Fdx, Fdy, Fdz | Drag forces applied to the vehicle CM along the vehicle-fixed x-, y-, and z-axes |
| Mextx, Mexty, Mextz | External moment about the vehicle CM about the vehicle-fixed x-, y-, and z-axes |
| Mdx, Mdy, Mdz | Drag moment about the vehicle CM about the vehicle-fixed x-, y-, and z-axes |
| I | Vehicle body moments of inertia |
| a, b, c | Distance of the front, middle, and rear axles, respectively, from the normal projection point of the vehicle CM onto the common axle plane |
| h | Height of the vehicle CM above the axle plane |
| d | Lateral distance from the geometric centerline to the center of mass along the vehicle-fixed y-axis |
hh_f, hh_r | Height of the front and rear hitches, respectively, above the axle plane along the vehicle-fixed z-axis |
dh_f, dh_r | Longitudinal distance of the front and rear hitches, respectively, from the normal projection point of the vehicle CM onto the common axle plane |
hl_f, hl_r | Lateral distance from center of mass to the front and rear hitches, respectively, along the vehicle-fixed y-axis |
| wF, wM, wR | Front, middle, and rear track widths, respectively |
| Cd | Air drag coefficient acting along the vehicle-fixed x-axis |
| Cs | Air drag coefficient acting along the vehicle-fixed y-axis |
| Cl | Air drag coefficient acting along the vehicle-fixed z-axis |
| Crm | Air drag roll moment acting about the vehicle-fixed x-axis |
| Cpm | Air drag pitch moment acting about the vehicle-fixed y-axis |
| Cym | Air drag yaw moment acting about the vehicle-fixed z-axis |
| Af | Frontal area |
| R | Atmospheric specific gas constant |
| T | Environmental air temperature |
| Pabs | Environmental absolute pressure |
| wx, wy, wz | Wind speed along the vehicle-fixed x-, y-, and z-axes |
| Wx, Wy, Wz | Wind speed along inertial X-, Y-, and Z-axes |
Examples
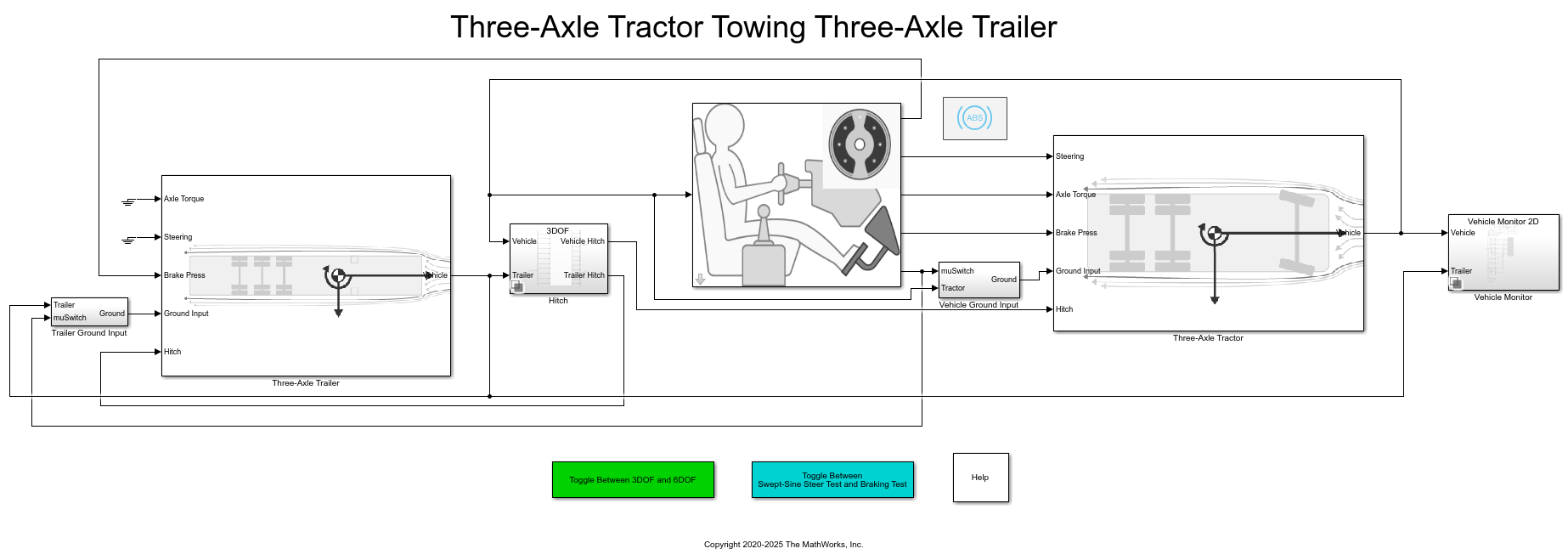
Three-Axle Tractor Towing a Three-Axle Trailer
Simulates three-axle tractor towing a three-axle trailer for commercial trucking applications. Implements hitch subsystem, sinusoidal wave steering or braking test, and axle torque applied to tractor rear wheels.
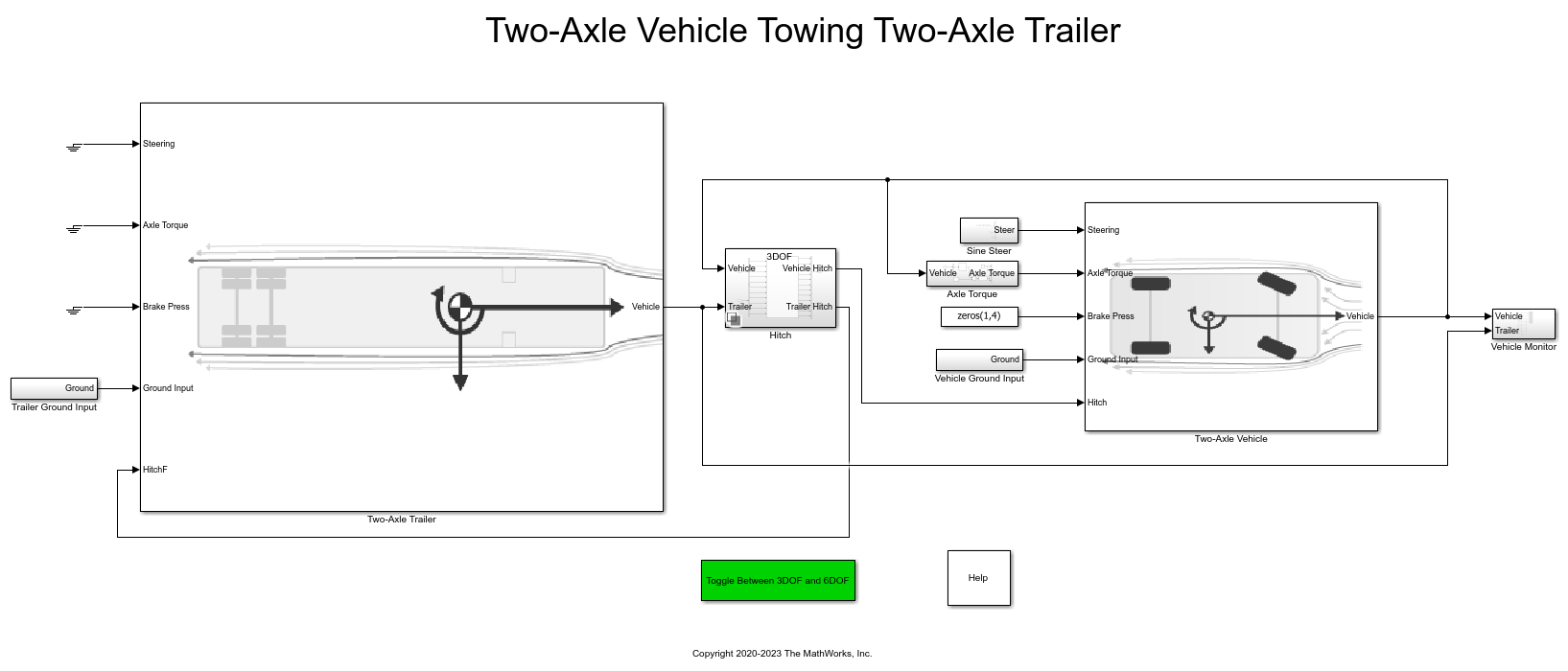
Two-Axle Tractor Towing a Two-Axle Trailer
Simulate a two-axle tractor towing a two-axle trailer for a commercial trucking application. Model implements a hitch subsystem, sinusoidal wave steering input, and an axle torque applied to the rear wheels of the tractor.
Ports
Input
Suspension longitudinal, lateral, and vertical suspension forces,
FSusp, applied to the trailer at the hardpoint
location, in N, specified as a 3-by-2,
3-by-4, or 3-by-6 array,
depending on the Number of axles parameter.
Number of axles Setting | Variable | Signal Dimension |
|---|---|---|
|
| Array –
|
|
| Array –
|
|
| Array –
|
The arrays use these variables.
| FFLx, FFLy, FFLz | Suspension forces applied to front left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FFRx, FFRy, FFRz | Suspension forces applied to front right hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FMLx, FMLy, FMLz | Suspension forces applied to middle left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FMRx, FMRy, FMRz | Suspension forces applied to middle right hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FRLx, FRLy, FRLz | Suspension forces applied to rear left hardpoint along the vehicle-fixed x-, y-, and z-axes |
| FRRx, FRRy, FRRz | Suspension forces applied to rear right hardpoint along the vehicle-fixed x-, y-, and z-axes |
Suspension longitudinal, lateral, and vertical suspension moments,
MSusp, applied about the vehicle at the hardpoint
location, in N·m, specified as a 3-by-2,
3-by-4, or 3-by-6 array,
depending on the Number of axles parameter.
Number of axles Setting | Variable | Signal Dimension |
|---|---|---|
|
| Array –
|
|
| Array –
|
|
| Array –
|
The arrays use these variables.
| MFLx, MFLy, MFLz | Suspension moment applied to front left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MFRx, MFRy, MFRz | Suspension moment applied to front right hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MMLx, MMLy, MMLz | Suspension moment applied to middle left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MMRx, MMRy, MMRz | Suspension moment applied to middle right hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MRLx, MRLy, MRLz | Suspension moment applied to rear left hardpoint about the vehicle-fixed x-, y-, and z-axes |
| MRRx, MRRy, MRRz | Suspension moment applied to rear right hardpoint about the vehicle-fixed x-, y-, and z-axes |
External forces on the vehicle, in N, specified as a 1-by-3 or
3-by-1 vector.
| Array Element | Force Axis |
|---|---|
| Vehicle-fixed x-axis (longitudinal) |
| Vehicle-fixed y-axis (lateral) |
| Vehicle-fixed z-axis (vertical) |
External moments acting on the vehicle, in N·m, specified as a
1-by-3 or 3-by-1 vector.
| Array Element | Force Axis |
|---|---|
MExt(1,1) | Vehicle-fixed x-axis (longitudinal) |
| Vehicle-fixed y-axis (lateral) |
| Vehicle-fixed z-axis (vertical) |
Hitch force applied to the body at the front hitch location,
FhFx,
FhFy,
FhFz, in the vehicle-fixed frame, in
N, specified as a 1-by-3 or 3-by-1 array.
Dependencies
To enable this port, under Input signals, select Front hitch forces.
Hitch moment at the front hitch location,
MhFx,
MhFy,
MhFz, about the
vehicle-fixed frame, in N·m, specified as a 1-by-3 or
3-by-1 array.
Dependencies
To enable this port, under Input signals, select Front hitch moments.
Hitch force applied to the body at the rear hitch location,
FhRx,
FhRy,
FhRz, in the vehicle-fixed frame, in
N, specified as a 1-by-3 or 3-by-1 array.
Dependencies
To enable this port, under Input signals, select Rear hitch forces.
Hitch moment at the rear hitch location,
MhRx,
MhRy,
MhRz, about the
vehicle-fixed frame, in N·m, specified as a 1-by-3 or
3-by-1 array.
Dependencies
To enable this port, under Input signals, select Rear hitch moments.
Wind speed, Wx,
Wy,
Wz along inertial X-,
Y-, and Z-axes, in m/s, specified as a
1-by-3 or 3-by-1 array.
Ambient air temperature, Tair, in K, specified as a scalar.
Dependencies
To enable this port, under Environment, select Air temperature.
Output
Trailer body information, returned as a bug signal containing the following values.
| Signal | Description | Value | Units | |||||
|---|---|---|---|---|---|---|---|---|
InertFrm | Cg | Disp | X | Vehicle CM displacement along the earth-fixed X-axis | Computed | m | ||
Y | Vehicle CM displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Vehicle CM displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Vehicle CM velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Vehicle CM velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Vehicle CM velocity along the earth-fixed Z-axis | Computed | m/s | |||||
Ang | phi | Rotation of the vehicle-fixed frame about the earth-fixed X-axis (roll) | Computed | rad | ||||
theta | Rotation of the vehicle-fixed frame about the earth-fixed Y-axis (pitch) | Computed | rad | |||||
psi | Rotation of the vehicle-fixed frame about the earth-fixed Z-axis (yaw) | Computed | rad | |||||
FrntAxl | Lft | Disp | X | Front left axle displacement along the earth-fixed X-axis | Computed | m | ||
Y | Front left axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Front left axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Front left axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Front left axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Front left axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
Rght | Disp | X | Front right axle displacement along the earth-fixed X-axis | Computed | m | |||
Y | Front right axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Front right axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Front right axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Front right axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Front right axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
MidlAxl | Lft | Disp | X | Middle left axle displacement along the earth-fixed X-axis | Computed | m | ||
Y | Middle left axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Middle left axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Middle left axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Middle left axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Middle left axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
Rght | Disp | X | Middle right axle displacement along the earth-fixed X-axis | Computed | m | |||
Y | Middle right axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Middle right axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Middle right axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Middle right axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Middle right axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
RearAxl | Lft | Disp | X | Rear left axle displacement along the earth-fixed X-axis | Computed | m | ||
Y | Rear left axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Rear left axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Rear left axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Rear left axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Rear left axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
Rght | Disp | X | Rear right axle displacement along the earth-fixed X-axis | Computed | m | |||
Y | Rear right axle displacement along the earth-fixed Y-axis | Computed | m | |||||
Z | Rear right axle displacement along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Rear right axle velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Rear right axle velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Rear right axle velocity along the earth-fixed Z-axis | Computed | m/s | |||||
HitchF | Disp | X | Trailer front hitch offset from the axle plane along the earth-fixed X-axis | Computed | m | |||
Y | Trailer front hitch offset from the center plane along the earth-fixed Y-axis | Computed | m | |||||
Z | Trailer front hitch offset from the axle plane along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Trailer front hitch offset velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Trailer front hitch offset velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Trailer front hitch offset velocity along the earth-fixed Z-axis | Computed | m/s | |||||
HitchR | Disp | X | Trailer rear hitch offset from the axle plane along the earth-fixed X-axis | Computed | m | |||
Y | Trailer rear hitch offset from the center plane along the earth-fixed Y-axis | Computed | m | |||||
Z | Trailer rear hitch offset from the axle plane along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Hitch velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Hitch velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Hitch velocity along the earth-fixed Z-axis | Computed | m/s | |||||
Geom | Disp | X | Trailer offset from the axle plane along the earth-fixed X-axis | Computed | m | |||
Y | Trailer offset from the center plane along the earth-fixed Y-axis | Computed | m | |||||
Z | Trailer offset from the axle plane along the earth-fixed Z-axis | Computed | m | |||||
Vel | Xdot | Trailer offset velocity along the earth-fixed X-axis | Computed | m/s | ||||
Ydot | Trailer offset velocity along the earth-fixed Y-axis | Computed | m/s | |||||
Zdot | Trailer offset velocity along the earth-fixed Z-axis | Computed | m/s | |||||
BdyFrm | Cg | Vel | xdot | Vehicle CM velocity along the vehicle-fixed x-axis | Computed | m/s | ||
ydot | Vehicle CM velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Vehicle CM velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
AngVel | p | Vehicle angular velocity about the vehicle-fixed x-axis (roll rate) | Computed | rad/s | ||||
q | Vehicle angular velocity about the vehicle-fixed y-axis (pitch rate) | Computed | rad/s | |||||
r | Vehicle angular velocity about the vehicle-fixed z-axis (yaw rate) | Computed | rad/s | |||||
Acc | ax | Vehicle CM acceleration along the vehicle-fixed x-axis | Computed | gn | ||||
ay | Vehicle CM acceleration along the vehicle-fixed y-axis | Computed | gn | |||||
az | Vehicle CM acceleration along the vehicle-fixed z-axis | Computed | gn | |||||
xddot | Vehicle CM acceleration along the vehicle-fixed x-axis | Computed | m/s^2 | |||||
yddot | Vehicle CM acceleration along the vehicle-fixed y-axis | Computed | m/s^2 | |||||
zddot | Vehicle CM acceleration along the vehicle-fixed z-axis | Computed | m/s^2 | |||||
DCM | Direction cosine matrix | Computed | rad | |||||
Forces | Body | Fx | Net force on the vehicle CM along the vehicle-fixed x-axis | Computed | N | |||
Fy | Net force on the vehicle CM along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Net force on the vehicle CM along the vehicle-fixed z-axis | Computed | N | |||||
Ext | Fx | External force on the vehicle CM along the vehicle-fixed x-axis | Input | N | ||||
Fy | External force on the vehicle CM along the vehicle-fixed x-axis | Input | N | |||||
Fz | External force on the vehicle CM along the vehicle-fixed x-axis | Input | N | |||||
FrntAxl | Lft | Fx | Front left axle velocity along the earth-fixed Y-axis | Computed | N | |||
Fy | Lateral force on the left side of the front axle left along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Normal force on the left side of the front axle along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Longitudinal force on the right side of the front axle along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Lateral force on the right side of the front axle left along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Normal force on the right side of the front axle along the vehicle-fixed z-axis | Computed | N | |||||
MidlAxl | Lft | Fx | Longitudinal force on the left side of the middle axle along the vehicle-fixed x-axis | Computed | N | |||
Fy | Longitudinal force on the left side of the middle axle along the vehicle-fixed x-axis | Computed | N | |||||
Fz | Normal force on the left side of the middle axle along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Longitudinal force on the right side of the middle axle along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Lateral force on the right side of the middle axle left along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Normal force on the right side of the middle axle along the vehicle-fixed z-axis | Computed | N | |||||
RearAxl | Lft | Fx | Longitudinal force on the left side of the rear axle along the vehicle-fixed x-axis | Computed | N | |||
Fy | Lateral force on the left side of the rear axle left along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Normal force on the left side of the rear axle along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Longitudinal force on the right side of the rear axle along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Lateral force on the right side of the rear axle left along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Normal force on the right side of the rear axle along the vehicle-fixed z-axis | Computed | N | |||||
HitchF | Fx | Hitch front force applied to the body at the hitch location along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Hitch front force applied to the body at the hitch location along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Hitch front force applied to the body at the hitch location along the vehicle-fixed z-axis | Computed | N | |||||
HitchR | Fx | Hitch rear force applied to the body at the hitch location along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Hitch rear force applied to the body at the hitch location along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Hitch rear force applied to the body at the hitch location along the vehicle-fixed z-axis | Computed | N | |||||
Tires | FrntTires | Lft | Fx | Front left tire force along the vehicle-fixed x-axis | Computed | N | ||
Fy | Front left tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Front left tire force along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Front right tire force along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Front right tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Front right tire force along the vehicle-fixed z-axis | Computed | N | |||||
MidlTires | Lft | Fx | Middle left tire force along the vehicle-fixed x-axis | Computed | N | |||
Fy | Middle left tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Middle left tire force along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Middle right tire force along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Middle right tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Middle right tire force along the vehicle-fixed z-axis | Computed | N | |||||
RearTires | Lft | Fx | Rear left tire force along the vehicle-fixed x-axis | Computed | N | |||
Fy | Rear left tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Rear left tire force along the vehicle-fixed z-axis | Computed | N | |||||
Rght | Fx | Rear right tire force along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Rear right tire force along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Rear right tire force along the vehicle-fixed z-axis | Computed | N | |||||
Drag | Fx | Drag force on the vehicle CM along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Drag force on the vehicle CM along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Drag force on the vehicle CM along the vehicle-fixed z-axis | Computed | N | |||||
Grvty | Fx | Gravity force on the vehicle CM along the vehicle-fixed x-axis | Computed | N | ||||
Fy | Gravity force on the vehicle CM along the vehicle-fixed y-axis | Computed | N | |||||
Fz | Gravity force on the vehicle CM along the vehicle-fixed z-axis | Computed | N | |||||
Moments | Body | Mx | Body moment on the vehicle CM about the vehicle-fixed x-axis | Computed | N·m | |||
My | Body moment on the vehicle CM about the vehicle-fixed y-axis | Computed | N·m | |||||
Mz | Body moment on the vehicle CM about the vehicle-fixed z-axis | Computed | N·m | |||||
Drag | Mx | Drag moment on the vehicle CM about the vehicle-fixed x-axis | Computed | N·m | ||||
My | Drag moment on the vehicle CM about the vehicle-fixed y-axis | Computed | N·m | |||||
Mz | Drag moment on the vehicle CM about the vehicle-fixed z-axis | Computed | N·m | |||||
Ext | Mx | External moment on the vehicle CG about the vehicle-fixed x-axis | Computed | N·m | ||||
My | External moment on the vehicle CG about the vehicle-fixed y-axis | Computed | N·m | |||||
Mz | External moment on the vehicle CG about the vehicle-fixed z-axis | Computed | N·m | |||||
HitchF | Mx | Hitch moment at the front hitch location about vehicle-fixed x-axis | Computed | N·m | ||||
My | Hitch moment at the front hitch location about vehicle-fixed y-axis | Computed | N·m | |||||
Mz | Hitch moment at the front hitch location about vehicle-fixed z-axis | Computed | N·m | |||||
HitchR | Mx | Hitch moment at the rear hitch location about vehicle-fixed x-axis | Computed | N·m | ||||
My | Hitch moment at the rear hitch location about vehicle-fixed y-axis | Computed | N·m | |||||
Mz | Hitch moment at the rear hitch location about vehicle-fixed z-axis | Computed | N·m | |||||
FrntAxl | Lft | Disp | x | Front left axle displacement along the vehicle-fixed x-axis | Computed | m | ||
y | Front left axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Front left axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Front left axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Front left axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Front left axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
Rght | Disp | x | Front right axle displacement along the vehicle-fixed x-axis | Computed | m | |||
y | Front right axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Front right axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Front right axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Front right axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Front right axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
MidlAxl | Lft | Disp | x | Middle left axle displacement along the vehicle-fixed x-axis | Computed | m | ||
y | Middle left axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Middle left axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Middle left axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Middle left axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Middle left axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
Rght | Disp | x | Middle right axle displacement along the vehicle-fixed x-axis | Computed | m | |||
y | Middle right axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Middle right axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Middle right axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Middle right axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Middle right axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
RearAxl | Lft | Disp | x | Rear left axle displacement along the vehicle-fixed x-axis | Computed | m | ||
y | Rear left axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Rear left axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Rear left axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Rear left axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Rear left axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
Rght | Disp | x | Rear right axle displacement along the vehicle-fixed x-axis | Computed | m | |||
y | Rear right axle displacement along the vehicle-fixed y-axis | Computed | m | |||||
z | Rear right axle displacement along the vehicle-fixed z-axis | Computed | m | |||||
Vel | xdot | Rear right axle velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Rear right axle velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Rear right axle velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
HitchF | Disp | x | Front hitch offset from axle plane along the vehicle-fixed x-axis | Input | ||||
y | Front hitch offset from center plane along the vehicle-fixed y-axis | Input | ||||||
z | Front hitch offset from axle plane along the earth-fixed z-axis | Input | ||||||
Vel | xdot | Front hitch offset velocity along the vehicle-fixed x-axis | Computed | |||||
ydot | Front hitch offset velocity along the vehicle-fixed y-axis | Computed | ||||||
zdot | Front hitch offset velocity along the vehicle-fixed z-axis | 0 | ||||||
HitchR | Disp | x | Rear hitch offset from axle plane along the vehicle-fixed x-axis | Input | m | |||
y | Rear hitch offset from center plane along the vehicle-fixed y-axis | Input | m | |||||
z | Rear hitch offset from axle plane along the earth-fixed z-axis | Input | m | |||||
Vel | xdot | Rear hitch offset velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Rear hitch offset velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Rear hitch offset velocity along the vehicle-fixed z-axis | 0 | m/s | |||||
Pwr | PwrExt | Applied external power | Computed | W | ||||
Drag | Power loss due to drag | Computed | W | |||||
Geom | Disp | x | Trailer offset from axle plane along the vehicle-fixed x-axis | Input | m | |||
y | Trailer offset from center plane along the vehicle-fixed y-axis | Input | m | |||||
z | Trailer offset from axle plane along the vehicle-fixed z-axis | Input | m | |||||
Vel | xdot | Trailer chassis offset velocity along the vehicle-fixed x-axis | Computed | m/s | ||||
ydot | Trailer chassis offset velocity along the vehicle-fixed y-axis | Computed | m/s | |||||
zdot | Trailer chassis offset velocity along the vehicle-fixed z-axis | Computed | m/s | |||||
Ang | Beta | Body slip angle, β
| Computed | rad | ||||
Vehicle CM velocity along the vehicle-fixed x-, y-, z-axes, respectively, in m/s, returned as a vector.
Vehicle CM angular velocity about the vehicle-fixed x- (roll rate), y- (pitch rate), z-axes (yaw rate), respectively, in rad/s, returned as a vector.
Direction cosine matrix, in rad, returned as an array.
Euler angles, φ, θ, and ψ, respectively, in rad, returned as an array.
Vehicle CM position along inertial-fixed X-, Y-, Z-axes, respectively, in m, returned as a vector.
Vehicle CM velocity along inertial-fixed X-, Y-, Z-axes, respectively, in m/s, returned as a vector.
Parameters
Block Options
Input Signals
Chassis
Vehicle mass, m, in kg. This mass typically corresponds to a sprung mass.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | m |
| Values: | 2000 (default) | scalar |
| Data Types: | double |
Distance from the vehicle CM to the middle axle, b, in m.
Dependencies
To enable this parameter, set Number of axles
to 3.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | b |
| Values: | 1.6 (default) | scalar |
| Data Types: | double |
Distance from the vehicle CM to the rear axle, c, in m.
Dependencies
To enable this parameter, set Number of axles
to 2 or
3.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | c |
| Values: | 1.9 (default) | scalar |
| Data Types: | double |
Lateral distance from the geometric centerline to the CM, d, in m, along the vehicle-fixed y-axis. Positive values indicate that the vehicle CM is to the right of the geometric centerline. Negative values indicate that the vehicle CM is to the left of the geometric centerline.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | d |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Vertical distance from the vehicle CM to the axle plane, h, in m.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | h |
| Values: | .35 (default) | scalar |
| Data Types: | double |
Longitudinal distance from center of mass to front hitch, dh_f, in m.
Dependencies
To enable this parameter, on the Input signals pane, select Front hitch forces or Front hitch moments.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | dh_f |
| Values: | 1 (default) | scalar |
| Data Types: | double |
Lateral distance from the geometric centerline to the front hitch, hl_f, in m, along the vehicle-fixed y. Positive values indicate that the trailer hitch is to the right of the geometric centerline. Negative values indicate that the trailer hitch is to the left of the geometric centerline.
Dependencies
To enable this parameter, on the Input signals pane, select Front hitch forces or Front hitch moments.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | hl_f |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Vertical distance from front hitch to axle plane, hh_f, in m.
Dependencies
To enable this parameter, on the Input signals pane, select Front hitch forces or Front hitch moments.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | hh_f |
| Values: | 0.1 (default) | scalar |
| Data Types: | double |
Longitudinal distance from the center of mass to the rear hitch, dh_r, in m.
Dependencies
To enable this parameter, on the Input signals pane, select Rear hitch forces or Rear hitch moments.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | dh_r |
| Values: | 1 (default) | scalar |
| Data Types: | double |
Lateral distance from the geometric centerline to the rear hitch, hl_r, in m, along the vehicle-fixed y. Positive values indicate that the trailer hitch is to the right of the geometric centerline. Negative values indicate that the trailer hitch is to the left of the geometric centerline.
Dependencies
To enable this parameter, on the Input signals pane, select Rear hitch forces or Rear hitch moments.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | hl_r |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Vertical distance from the rear hitch to the axle plane, hh_r, in m.
Dependencies
To enable this parameter, on the Input signals pane, select Rear hitch forces or Rear hitch moments.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | hh_r |
| Values: | 0.1 (default) | scalar |
| Data Types: | double |
Initial position of the vehicle in the inertial frame, Xeo, in m.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Xe_o |
| Values: | [0,0,0] (default) | vector |
| Data Types: | double |
Initial vehicle CM velocity along the vehicle-fixed x, y-, and z-axes, respectively, in m/s.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | xbdot_o |
| Values: | [0,0,0] (default) | vector |
| Data Types: | double |
Initial Euler rotation of the vehicle-fixed frame about the earth-fixed X- (roll), Y- (pitch), Z-axes (yaw), respectively, in rad.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | eul_o |
| Values: | [0,0,0] (default) | vector |
| Data Types: | double |
Initial vehicle CM angular velocity about the vehicle-fixed x- (roll rate), y- (pitch rate), z-axes (yaw rate), respectively, in rad/s.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | p_o |
| Values: | [0,0,0] (default) | vector |
| Data Types: | double |
Vehicle inertia tensor,
Iveh, in kg*m^2. Dimensions
are [3-by-3].
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Iveh |
| Values: | [430 0 0; 0 1900 0; 0 0
2100] (default) | array |
| Data Types: | double |
Middle track width, in m.
Dependencies
To enable this parameter, set Number of axles
to 3.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | w_m |
| Values: | 1.9 (default) | scalar |
| Data Types: | double |
Rear track width, in m.
Dependencies
To enable this parameter, set Number of axles
to 2 or
3.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | w_r |
| Values: | 1.9 (default) | scalar |
| Data Types: | double |
Inertial Loads
Front End
Distance vector from front axle to load, z1R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z1R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z1R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z1R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z1R |
| Values: | [-.25,.125,.15] (default) | vector |
| Data Types: | double |
Inertia tensor, z1I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z1I |
| Values: | [1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (default) | array |
| Data Types: | double |
Overhead
Distance vector from front axle to load, z2R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z2R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z2R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z2R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z2R |
| Values: | [1.4,0,.8] (default) | vector |
| Data Types: | double |
Inertia tensor, z2I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z2I |
| Values: | [1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (default) | array |
| Data Types: | double |
Front Left
Distance vector from front axle to load, z3R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z3R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z3R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z3R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z3R |
| Values: | [.75,-.5,.4] (default) | vector |
| Data Types: | double |
Inertia tensor, z3I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z3I |
| Values: | [5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (default) | array |
| Data Types: | double |
Front Right
Distance vector from front axle to load, z4R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z4R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z4R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z4R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z4R |
| Values: | [.75,.5,.4] (default) | vector |
| Data Types: | double |
Inertia tensor, z4I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z4I |
| Values: | [5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (default) | array |
| Data Types: | double |
Rear Left
Distance vector from front axle to load, z5R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z5R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z5R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z5R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z5R |
| Values: | [1.25,-.5,.4] (default) | vector |
| Data Types: | double |
Inertia tensor, z5I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z5I |
| Values: | [5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (default) | array |
| Data Types: | double |
Rear Right
Distance vector from front axle to load, z6R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z6R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z6R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z6R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z6R |
| Values: | [1.25,.5,.4] (default) | vector |
| Data Types: | double |
Inertia tensor, z6I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z6I |
| Values: | [5,-.1,-2;-2,9,.1;-.1,.1,6].*0 (default) | array |
| Data Types: | double |
Rear End
Distance vector from front axle to load, z7R, in m.
Dimensions are 1-by-3.
| Array Element | Description |
|---|---|
z7R(1,1) | Front suspension hardpoint to load, along vehicle-fixed x-axis |
z7R(1,2) | Vehicle centerline to load, along vehicle-fixed y-axis |
z7R(1,3) | Front suspension hardpoint to load, along vehicle-fixed z-axis |
For example, this table summarizes the parameter settings that specify the load location.
Example Location | Sign |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z7R |
| Values: | [2,0,.25] (default) | vector |
| Data Types: | double |
Inertia tensor, z7I, in kg·m^2. Dimensions are
[3-by-3].
The tensor uses a coordinate system with an origin at the load CM.
x-axis along the vehicle-fixed x-axis
y-axis along the vehicle-fixed y-axis
z-axis along the vehicle-fixed z-axis
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | z7I |
| Values: | [1.4,-.2,.1;-.2,1.4,.1;.1,.1,2.25].*0 (default) | array |
| Data Types: | double |
Aerodynamic
Effective vehicle cross-sectional area, Af to calculate the aerodynamic drag force on the vehicle, in m^2.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Af |
| Values: | 2 (default) | scalar |
| Data Types: | double |
Longitudinal drag pitch moment coefficient, Cpm, dimensionless.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Cpm |
| Values: | .1 (default) | scalar |
| Data Types: | double |
Side force coefficient vector coefficient, Cs, dimensionless.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Cs |
| Values: | [0:0.01:0.1] (default) | vector |
| Data Types: | double |
Yaw moment coefficient vector coefficient, Cym, dimensionless.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Cym |
| Values: | [0:0.001:0.01] (default) | vector |
| Data Types: | double |
Environment
Ambient air temperature, Tair, in K.
Dependencies
To enable this parameter, clear Air temperature.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Tair |
| Values: | 273 (default) | scalar |
| Data Types: | double |
Simulation
Longitudinal velocity tolerance, xdottol, in m/s.
The block uses this parameter to avoid a division by zero when it calculates the body slip angle, β.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | xdot_tol |
| Values: | .1 (default) | scalar |
| Data Types: | double |
Geometric longitudinal offset of the trailer chassis from the CG along the body longitudinal axis, in m. When you use the 3D visualization engine, consider using the offset to locate the chassis independent of the vehicle CG.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | longOff |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Geometric lateral offset of the trailer chassis from the CG along the body lateral axis, in m. When you use the 3D visualization engine, consider using the offset to locate the chassis independent of the vehicle CG.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | latOff |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Geometric vertical offset of the trailer chassis from the CG along the body vertical axis, in m. When you use the 3D visualization engine, consider using the offset to locate the chassis independent of the vehicle CG.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | vertOff |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Wrap the Euler angles to the interval [-pi, pi].
For vehicle maneuvers that might undergo vehicle yaw rotations that are
outside of the interval, consider clearing the parameter if you want to:
Track the total vehicle yaw rotation.
Avoid discontinuities in the vehicle state estimators.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | wrapAng |
| Values: | on (default) | off |
| Data Types: | character vector |
References
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2020b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)