estimateUncalibratedRectification
(Not recommended) Uncalibrated stereo rectification
estimateUncalibratedRectification is not recommended. Use the
estimateStereoRectification function instead. For more information, see
Version History.
Description
[
returns projective transformations for rectifying stereo images. This function
does not require either intrinsic or extrinsic camera parameters.T1,T2]
= estimateUncalibratedRectification(F,inlierPoints1,inlierPoints2,imagesize)
Examples
This example shows how to compute the fundamental matrix from corresponding points in a pair of stereo images.
Load the stereo images and feature points which are already matched.
I1 = imread('yellowstone_left.png'); I2 = imread('yellowstone_right.png'); load yellowstone_inlier_points;
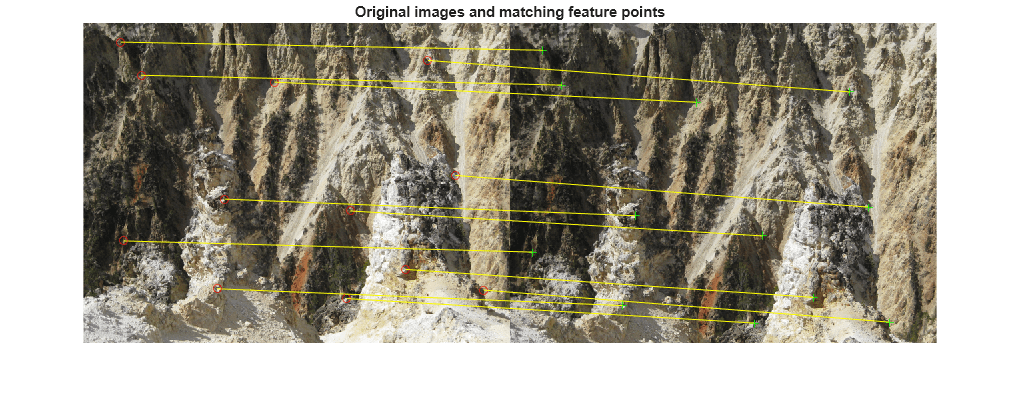
Display point correspondences. Notice that the matching points are in different rows, indicating that the stereo pair is not rectified.
showMatchedFeatures(I1, I2,inlier_points1,inlier_points2,'montage'); title('Original images and matching feature points');
Compute the fundamental matrix from the corresponding points.
f = estimateFundamentalMatrix(inlier_points1,inlier_points2,... 'Method','Norm8Point');
Compute the rectification transformations.
[t1, t2] = estimateUncalibratedRectification(f,inlier_points1,...
inlier_points2,size(I2));Rectify the stereo images using projective transformations t1 and t2.
[I1Rect,I2Rect] = rectifyStereoImages(I1,I2,t1,t2);
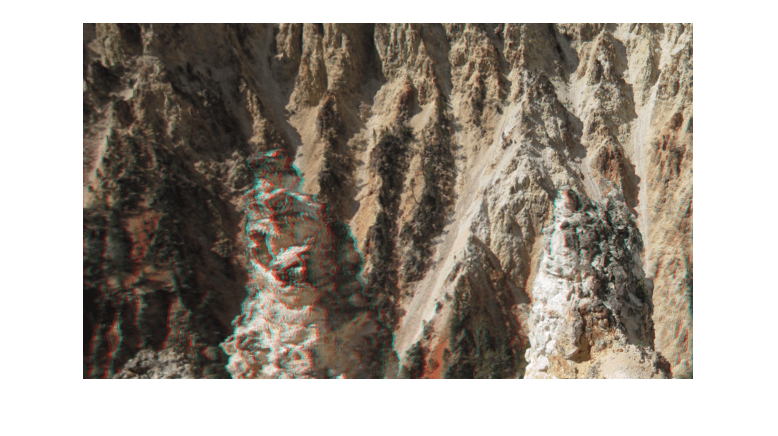
Display the stereo anaglyph, which can also be viewed with 3-D glasses.
figure; imshow(stereoAnaglyph(I1Rect,I2Rect));
Input Arguments
Output Arguments
Tips
An epipole may be located in the first image or the second image. Applying the output uncalibrated rectification of
T1(orT2) to image1(or image2) may result in an undesired distortion. You can check for an epipole within an image by applying theisEpipoleInImagefunction.
References
[1]
[2] Pollefeys, M., Koch, R., and Van Gool, L.. A Simple and Efficient Rectification Method for General Motion. Proceedings of the Seventh IEEE International Conference on Computer Vision. Volume 1, pages 496-501. 1999. DOI:10.1109/ICCV.1999.791262.
Extended Capabilities
Version History
Introduced in R2012bSee Also
Apps
Objects
MSERRegions|SIFTPoints|SURFPoints|BRISKPoints|ORBPoints|cornerPoints|cameraParameters|stereoParameters