objectDetectionMetrics
Description
Use the objectDetectionMetrics object and its object functions to
evaluate the quality of object detection results.
An objectDetectionMetrics object stores object detection quality metrics,
such as the average precision (AP) and precision recall, computed per class. To compute the AP
and precision recall metrics, pass the objectDetectionMetrics object to the
averagePrecision
or the precisionRecall
object functions, respectively. To compute the confusion matrix, pass the
objectDetectionMetrics object to the confusionMatrix
object function. Evaluate the summary of all metrics across all classes and all images in the
data set using the summarize object
function.
To get started with evaluating object detector performance using the performance metrics, see Evaluate Object Detector Performance.
Creation
Create an objectDetectionMetrics object by using the evaluateObjectDetection function.
Properties
Object Functions
imageMetrics | Evaluate per-image object detection performance metrics |
averagePrecision | Evaluate average precision metric of object detection results |
confusionMatrix | Compute confusion matrix of object detection results |
precisionRecall | Get precision recall metrics of object detection results |
summarize | Summarize object detection performance metrics at data set and class level |
metricsByArea | Evaluate detection performance across object size ranges |
Examples
Load a table containing images and ground truth bounding box labels. The first column contains the images, and the remaining columns contain the labeled bounding boxes.
data = load("vehicleTrainingData.mat");
trainingData = data.vehicleTrainingData;Set the value of the dataDir variable as the location where the vehicleTrainingData.mat file is located. Load the test data into a local vehicle data folder.
dataDir = fullfile(toolboxdir("vision"),"visiondata"); trainingData.imageFilename = fullfile(dataDir,trainingData.imageFilename);
Create an imageDatastore using the files from the table.
imds = imageDatastore(trainingData.imageFilename);
Display the first 5 rows of the training data table.
disp(trainingData(1:5,:))
imageFilename vehicle
_________________________________________________________________________________________________________________________________ ________________
"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/vision/visiondata/vehicles/image_00001.jpg" {[126 78 20 16]}
"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/vision/visiondata/vehicles/image_00002.jpg" {[100 72 35 26]}
"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/vision/visiondata/vehicles/image_00003.jpg" {[ 62 69 26 19]}
"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/vision/visiondata/vehicles/image_00004.jpg" {[ 71 64 22 21]}
"/mathworks/devel/bat/filer/batfs2566-0/Bdoc26a.3233028/build/runnable/matlab/toolbox/vision/visiondata/vehicles/image_00005.jpg" {[147 71 25 18]}
Create a boxLabelDatastore using the label columns from the table.
blds = boxLabelDatastore(trainingData(:,2:end));
Load Pretrained Object Detector
Load a pretrained YOLO v2 object detector trained to detect vehicles into the workspace.
vehicleDetector = load("yolov2VehicleDetector.mat");
detector = vehicleDetector.detector;Evaluate and Plot Object Detection Metrics
Run the detector on the test images. Set the detection threshold to a low value to detect as many objects as possible. This helps you evaluate the detector precision across the full range of recall values.
results = detect(detector,imds,Threshold=0.01);
Use evaluateObjectDetection to compute metrics for evaluating the performance of an object detector.
metrics = evaluateObjectDetection(results,blds);
Return the precision and recall metrics for the vehicle class using the precisionRecall object function.
[recall,precision,scores] = precisionRecall(metrics); ap = averagePrecision(metrics);
Plot the precision-recall curve for the vehicle class, the only class in the data set. Compute the average precision (AP) using the averagePrecision object function.
figure
plot(recall{1},precision{1})
grid on
title("Average Precision = " + ap);
xlabel("Recall");
ylabel("Precision");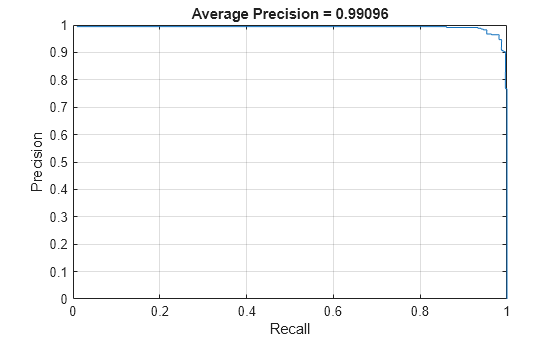
Compute the summary of the object detection metrics for the data set using the summarize object function.
[summaryDataset,summaryClass] = summarize(metrics); disp(summaryDataset)
NumObjects mAPOverlapAvg mAP0.5
__________ _____________ _______
336 0.99096 0.99096
Version History
Introduced in R2023bSee Also
Apps
Functions
evaluateObjectDetection|imageMetrics|averagePrecision|confusionMatrix|metricsByArea|precisionRecall
Topics
- Evaluate Object Detector Performance
- Calibrate Object Detection Confidence Scores
- Get Started with Object Detector Analyzer
- Multiclass Object Detection Using YOLO v2 Deep Learning
- Object Detection in Large Satellite Imagery Using Deep Learning
- Get Started with Object Detection Using Deep Learning
- Choose an Object Detector