pcsegdist
Segment point cloud into clusters based on Euclidean distance
Syntax
Description
labels = pcsegdist(ptCloud,minDistance)minDistance between points from different clusters.
pcsegdist assigns an integer cluster label to each point in
the point cloud, and returns the labels of all points.
[
also returns the number of clusters.labels,numClusters] = pcsegdist(ptCloud,minDistance)
[___] = pcsegdist(___,
sets properties using name-value arguments. For example, Name=Value)labels =
pcsegdist(
sets the minimum and maximum number of points in each cluster to
ptCloud,minDistance,NumClusterPoints=[1,Inf])[1,Inf].
Examples
Create two concentric spheres and combine them.
[X,Y,Z] = sphere(100);
loc1 = [X(:),Y(:),Z(:)];
loc2 = 2*loc1;
ptCloud = pointCloud([loc1;loc2]);
pcshow(ptCloud)
title('Point Cloud')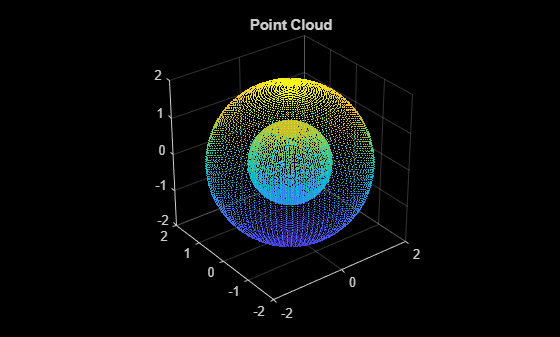
Set the minimum Euclidean distance between clusters.
minDistance = 0.5;
Segment the point cloud.
[labels,numClusters] = pcsegdist(ptCloud,minDistance);
Plot the labeled results. The points are grouped into two clusters.
pcshow(ptCloud.Location,labels)
colormap(hsv(numClusters))
title('Point Cloud Clusters')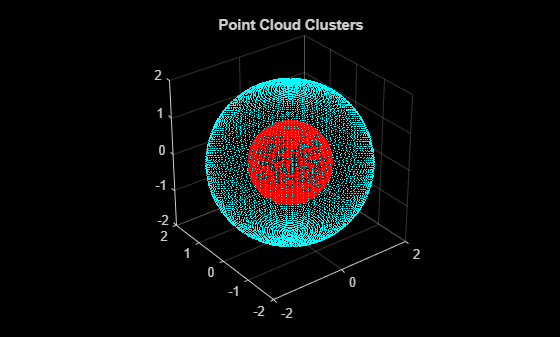
Load an organized lidar point cloud to the workspace.
ld = load('drivingLidarPoints.mat');Detect the ground plane. Distance is measured in meters.
maxDistance = 0.9; referenceVector = [0 0 1]; [~,inliers,outliers] = pcfitplane(ld.ptCloud,maxDistance,referenceVector);
Remove the ground plane points.
ptCloudWithoutGround = select(ld.ptCloud,outliers);
Cluster the point cloud with a minimum of 10 points per cluster using the exhaustive method.
minDistance = 2; minPoints = 10; [labels,numClusters] = pcsegdist(ptCloudWithoutGround,minDistance,Method="exhaustive",... NumClusterPoints=minPoints);
Remove the points with a label value of 0.
idxValidPoints = find(labels); labelColorIndex = labels(idxValidPoints); segmentedPtCloud = select(ptCloudWithoutGround,idxValidPoints);
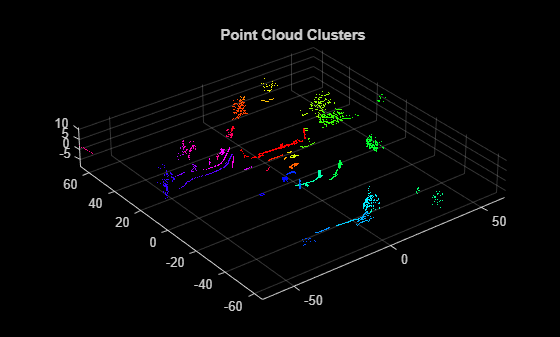
Plot the labeled results.
figure
colormap(hsv(numClusters))
pcshow(segmentedPtCloud.Location,labelColorIndex)
title('Point Cloud Clusters')