select
Select points in point cloud
Syntax
Description
ptCloudOut = select(ptCloud,indices) pointCloud object containing only the points that are selected using linear or
logical indices.
ptCloudOut = select(ptCloud,row,column)pointCloud object containing only the points
that are selected using row and column subscripts. This syntax applies only if the input is
an organized point cloud data of size
M-by-N-by-3.
ptCloudOut = select(___,OutputSize=outputSize)pointCloud object of size specified by
outputSize.
Examples
Read a point cloud data into the workspace.
ptCloud = pcread("teapot.ply");Read the number of points in the point cloud data.
Length = ptCloud.Count;
Select indices within the range [1, Length].
stepSize = 10; indices = 1:stepSize:Length;
Select points specified by the indices from input point cloud. This selection of points downsamples the input point cloud by a factor of stepSize.
ptCloudB = select(ptCloud,indices);
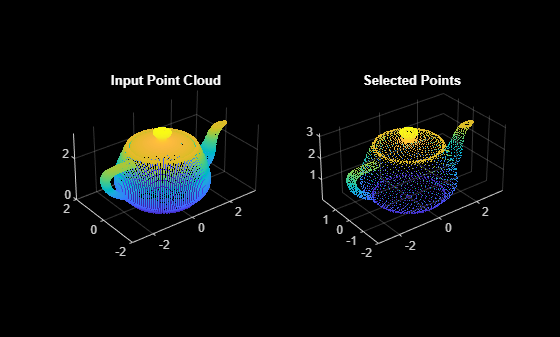
Display the input and the selected point cloud data.
figure subplot(1,2,1) pcshow(ptCloud) title("Input Point Cloud",Color=[1 1 1]); subplot(1,2,2) pcshow(ptCloudB) title("Selected Points",Color=[1 1 1]);
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2015a