rectifyStereoImages
Rectify pair of stereo images
Syntax
Description
[
undistorts and rectifies versions of
J1,J2,reprojectionMatrix]
= rectifyStereoImages(I1,I2,stereoParams)I1 and
I2 input images using the
stereo parameters of a stereo camera system stored
in the stereoParams object.
Use the reconstructScene function with the
reprojectionMatrix to
reproject a 2-D point in a disparity map to a 3-D
point in the rectified camera coordinate system of
camera 1.
Stereo image rectification projects images onto a common image plane in such a way that the
corresponding points have the same row
coordinates. This image projection makes the image
appear as though the two cameras are parallel. Use
the disparityBM or disparitySGM functions to compute a
disparity map from the rectified images for 3-D
scene reconstruction.
[___,
returns the 3-by-4 camera projection matrices
camMatrix1,camMatrix2,R1,R2]
= rectifyStereoImages(I1,I2,stereoParams)camMatrix1 and
camMatrix2 for the rectified
cameras, and the corresponding rectification
rotation matrices, R1 and
R2.
[
specifies options using one or more name-value
arguments in addition to any combination of
arguments from previous syntaxes. For example,
J1,J2]
= rectifyStereoImages(___,Name=Value)OutputView="valid" sets the
OutputView argument to
"valid".
Examples
Specify images containing a checkerboard for calibration.
imageDir = fullfile(toolboxdir("vision"),"visiondata", ... "calibration","stereo"); leftImages = imageDatastore(fullfile(imageDir,"left")); rightImages = imageDatastore(fullfile(imageDir,"right"));
Detect the checkerboards.
[imagePoints,patternDims] = detectCheckerboardPoints(...
leftImages.Files,rightImages.Files);Specify world coordinates of checkerboard keypoints.
squareSize = 108; % millimeters worldPoints = patternWorldPoints("checkerboard",patternDims,squareSize);
Read in the images.
I1 = readimage(leftImages,1); I2 = readimage(rightImages,1); imageSize = [size(I1,1),size(I1,2)];
Calibrate the stereo camera system.
stereoParams = estimateCameraParameters(imagePoints,worldPoints,ImageSize=imageSize);
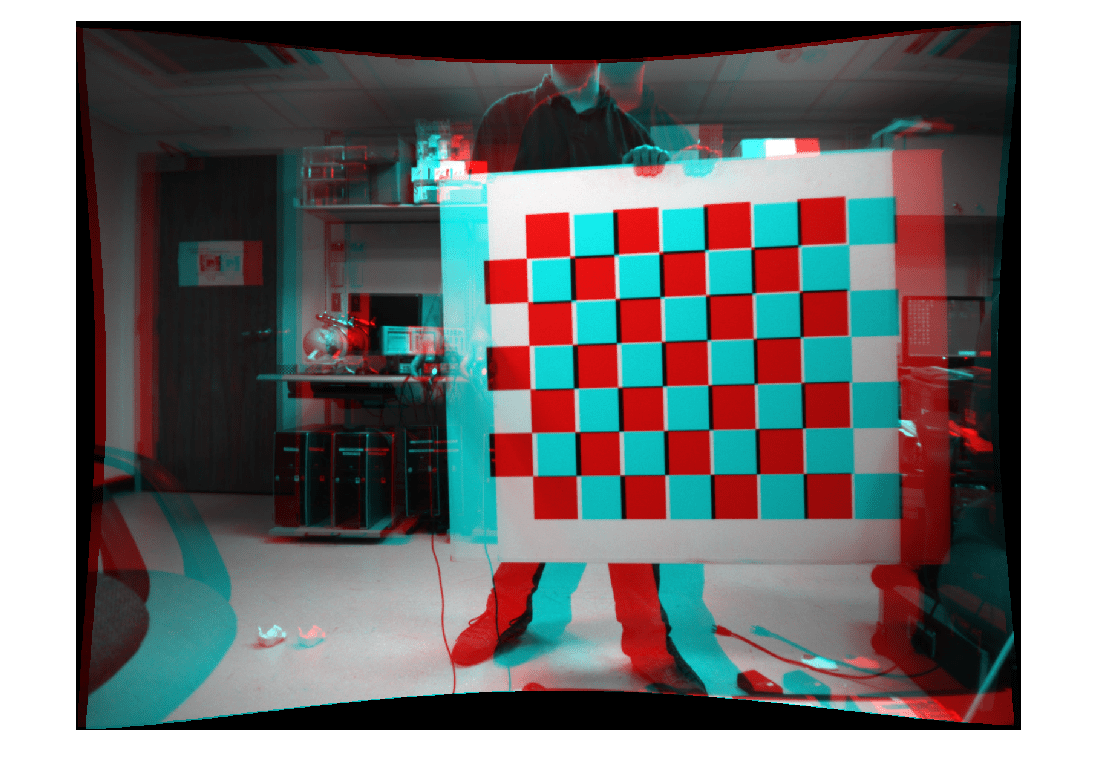
Rectify the images using "full" output view.
[J1_full,J2_full] = rectifyStereoImages(I1,I2,stereoParams,OutputView="full");Display the result for "full" output view.
figure; imshow(stereoAnaglyph(J1_full,J2_full));
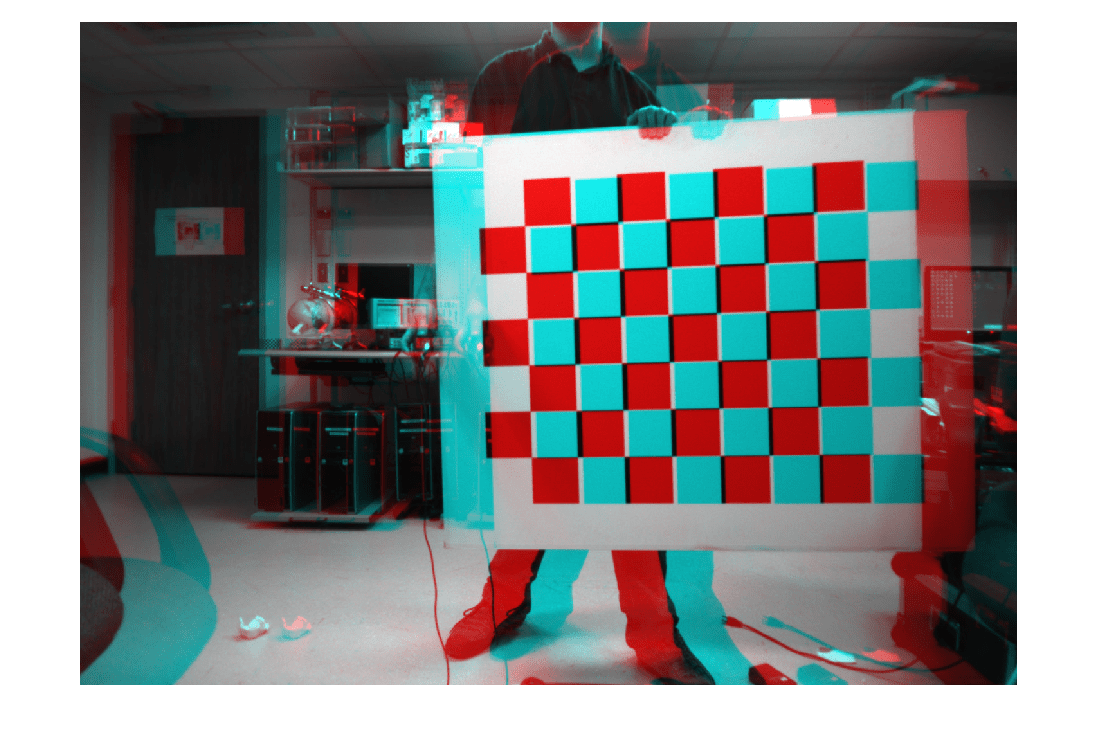
Rectify the images using "valid" output view. This is most suitable for computing disparity.
[J1_valid,J2_valid] = rectifyStereoImages(I1,I2,stereoParams,OutputView="valid");Display the result for "valid" output view.
figure; imshow(stereoAnaglyph(J1_valid,J2_valid));
Input Arguments
Name-Value Arguments
Output Arguments
Tips
The Computer Vision Toolbox™ rectification algorithm requires that the epipole for each image lie outside of the image. If the epipole lies within the image, you can first transform the images into polar coordinates as described in the rectification method proposed by Marc Pollefeys, Reinhard Koch, and Luc Van Gool [2].
References
[1] G. Bradski and A. Kaehler, Learning OpenCV : Computer Vision with the OpenCV Library. Sebastopol, CA: O'Reilly, 2008.
Extended Capabilities
Version History
Introduced in R2014aSee Also
Apps
Functions
reconstructScene|disparityBM|disparitySGM|estimateCameraParameters|estimateStereoRectification