Warp
Apply projective or affine transformation
Libraries:
Computer Vision Toolbox /
Geometric Transformations
Description
The Warp block transforms an image by applying projective or affine transformation. You can transform the entire image or a region of the image by defining a rectangular region of interest (ROI).
Examples

Apply Horizontal Shear Transformation to Image
Read an image into the MATLAB® workspace.

Rotate ROI in Image
Apply rotation transformation to a region of interest (ROI) in the input image.
Ports
Input
Output
Parameters
Source for passing transformation matrix, specified as either Input
port or Custom. If you select
Custom, you can enter the transformation matrix
coefficients by using the Transformation matrix parameter that
appears with this selection.
Value for transformation matrix, specified as a 3-by-2 matrix for affine transformation or 3-by-3 matrix for projective transformation.
Dependencies
To enable this parameter, set the Transformation matrix for
source parameter value to Custom.
Method for interpolating transformed pixel values, specified as Nearest
neighbor, Bilinear, or
Bicubic.
If you select Nearest neighbor, the block uses the value
of an nearby pixel for the new pixel value. If you select
Bilinear, the new pixel value is the weighted average of
the four nearest pixel values. If you select Bicubic, the new
pixel value is the weighted average of the sixteen nearest pixel values.
The number of pixels the block considers affects the complexity of the computation.
Therefore, the Nearest neighbor interpolation is the most
computationally efficient. However, because the accuracy of the method is proportional
to the number of pixels considered, the Bicubic method is the
most accurate. For information about the interpolation methods, see the More About
section.
Intensity value for background pixels in the transformed image, specified as one of these values:
scalar — If input image is a gray scale image.
3-element vector — If input image is a true color image. The vector is of the form [r g b] specifying the red (r), green (g), and blue (b) color channel values for the background pixels.
The default fill value is 0 and sets the background
color to black.
Source for passing a value for the output image size, specified as either
Same as input image or Custom.
If you select
Same as input image, the output transformed image is of same size as that of the input image.If you select
Custom, you must specify a bounding box to output only the image region that lies within the bounding box. This selection enables the Output image position vector [x y width height] parameter that you can use for specifying the bounding box value.
Size of the output image, specified as a four element vector of form
[x
y
width
height]. When you specify this parameter, the
Warp block creates a bounding box of specified width and
height values. The size of the output image is set to the size of the bounding box and
will contain the transformed image region that lies within the bounding box. If the size
of the output image is greater than the size of the transformed image region within the
bounding box, the intensity value of the extraneous pixels in the output image are set
to the value specified for Background fill value parameter.
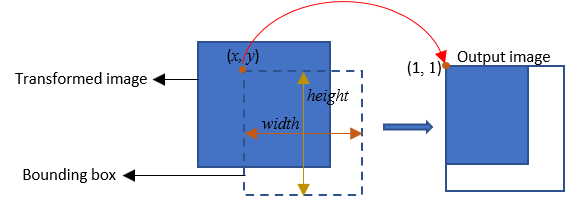
x and y are the spatial coordinates that define top-left corner position of the bounding box with respect to the input image.
Dependencies
To enable this parameter, set the Output image position
source parameter value to Custom.
Select this parameter to enable the ROI input port and specify
the ROI to be transformed.
Select this parameter to enable the Err_roi output port.
Dependencies
To enable this parameter, select the Enable ROI input port parameter.
Block simulation method, specified as Interpreted Execution or
Code Generation. If you want your block to use the MATLAB® interpreter, choose Interpreted Execution. If you want
your block to run as compiled code, choose Code Generation. For more
information, see Choosing a Simulation Mode (Simulink).
Block Characteristics
Data Types |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
More About
For nearest neighbor interpolation, the block uses nearby, translated, pixel values for the output pixel values.
For example, suppose this matrix, represents your input image,
and you want to translate this image 1.7 pixels in the positive horizontal direction using nearest neighbor interpolation. These steps illustrate the nearest neighbor interpolation algorithm followed by the block:
Zero pad the input matrix and translate it 1.7 pixels to the right.
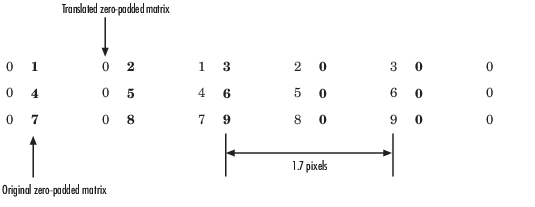
Create the output matrix by replacing each input pixel value with the translated value nearest to it resulting in this matrix:
Note
Despite specifying a value of 1.7 pixels to translate the image, this method translates the image by 2 pixels. Nearest neighbor interpolation is computationally efficient, but not as accurate as the bilinear and bicubic interpolation methods.
For bilinear interpolation, the block uses the weighted average of two translated pixel values for each output pixel value.
For example, suppose this matrix, represents your input image,
and you want to translate this image by 0.5 pixels in the positive horizontal direction using bilinear interpolation. These steps illustrate the bilinear interpolation algorithm followed by the block:
Zero pad the input matrix and translate it 0.5 pixels to the right.
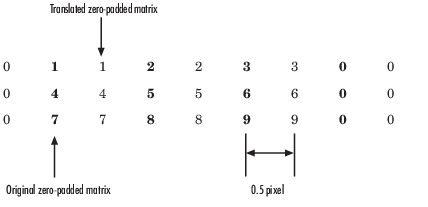
Create the output matrix by replacing each input pixel value with the weighted average of the translated pixel values on either side of the input pixel. The result is this matrix which has one column more than the input matrix.
For bicubic interpolation, the block uses the weighted average of four translated pixel values for each output pixel value.
For example, suppose this matrix, represents your input image,
and you want to translate this image by 0.5 pixels in the positive horizontal direction using bicubic interpolation. These steps illustrate the bicubic interpolation algorithm followed by the block:
Zero pad the input matrix and translate it by 0.5 pixels to the right.
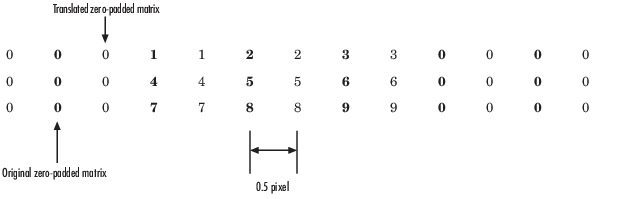
Create the output matrix by replacing each input pixel value with the weighted average of the two translated values on either side. The result is this matrix which has one column more than the input matrix:
Algorithms
Extended Capabilities
Version History
Introduced in R2015b