RS Decoder
Decode and recover message from RS codeword
Libraries:
Wireless HDL Toolbox /
Error Detection and Correction
Description
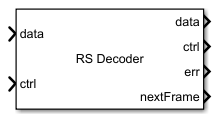
The RS Decoder block decodes and recovers a message from a Reed-Solomon
(RS) codeword. The block accepts codeword data and a samplecontrol bus and
(optionally) erasure and outputs a decoded message data, a samplecontrol
bus, whether the received data is corrupted, a block ready indicator, and (optionally) the
number of corrected errors. The block provides an architecture suitable for HDL code
generation and hardware deployment and supports shortened message lengths.
Because, the latency of the block varies, the block provides output port nextFrame that indicates when the block is ready to accept new input codeword data. For more details about latency, see the Algorithms section.
You can use this block to model many communication system forward error correcting (FEC) codes. The block supports digital subscriber line (DSL), WiMAX (802.16 m and e), digital video broadcast handheld (DVB-H) terminals, digital video broadcast satellite (DVB-S) services, and digital video broadcast satellite services to handheld (DVB-SH) devices below 3 MHz.
Examples

Decode and Recover Message from RS Codeword
Use RS Decoder block to decode and recover message from Reed-Solomon (RS) codeword.
Ports
Input
Output
Parameters
Algorithms
This figure shows the different stages of operations performed by the RS Decoder block.
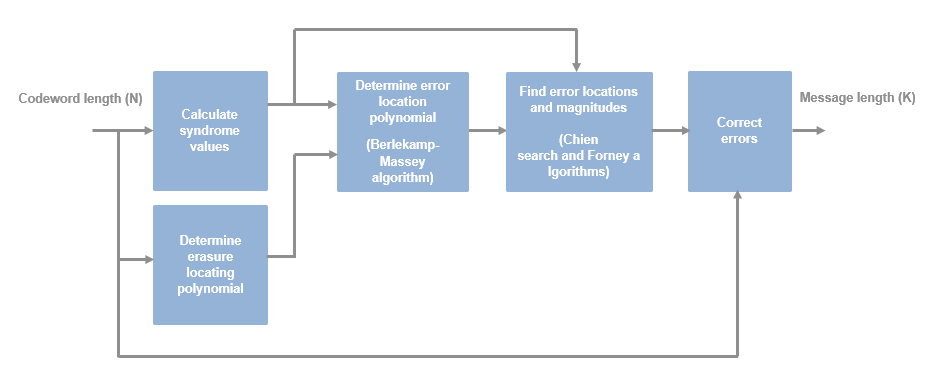
The block calculates syndrome values, determines the error location polynomial using Berlekamp-Massey algorithm, finds error locations and magnitudes using Chien search [5] and Forney [6] algorithms, respectively, and corrects the errors. For information about Berlekamp-Massey algorithm, see Algorithms for BCH and RS Errors-only Decoding.
The block can correct the RS code with v errors and f erasures, given an error correction capability of t, based on the following equation:
When v is less than or equal to t and f is equal to 0, the block corrects the errors and gives corrected output.
When v is equal to 0 and f/2 is less than or equal to t, the block corrects the erasures and gives corrected output.
When the sum of v and f/2 is less than or equal to t, the block corrects erasures and errors and gives corrected output.
The latency between valid input data and the corresponding valid output data depends on
the length of the codeword and the time the block takes to calculate error locating
polynomials and find error locations and magnitudes. The time for which the
nextFrame port value remains 0 depends on the
processing time of the block. The processing time of the block is equal to the sum of the
time the block takes to compute error locating polynomial (ELPTime) and
find error locations and error magnitudes (ConvTime). The processing time
is calculated as this value.
t is the number of errors an RS code can correct and is equal to (Codeword length (N) – Message length (K))/2.
The latency of the block is 2ceil (log2Processing_time) + 2 x Codeword length (N) + 2.
This figure shows a sample output of the RS Decoder block with latency
according to the DVB-S standard configuration, and Codeword length (N)
and Message length (K) parameter values specified as
255 and 239, respectively.
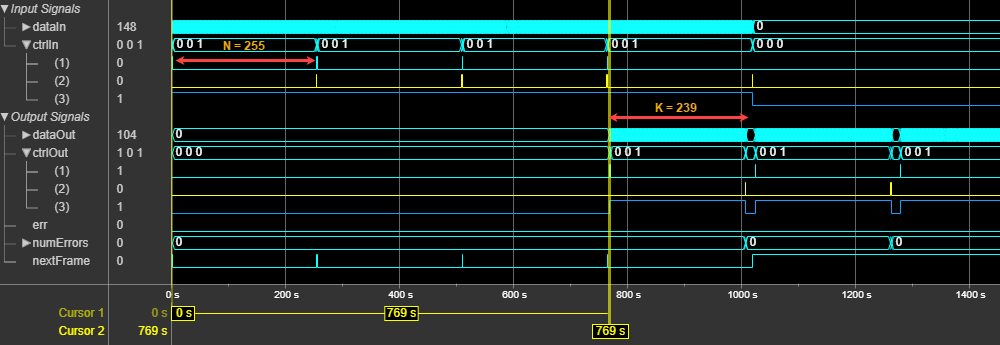
In this case, when the processing time is less than the Codeword length (N), the block provides support for a continuous input. The latency of the block is 769 clock cycles.
References
[1] Wicker, Stephen B. Error Control Systems for Digital Communication and Storage. Englewood Cliffs, NJ: Prentice Hall, 1995.
[2] Berlekamp, Elwyn R. Algebraic Coding Theory. Revised edition. McGraw-Hill Series in Systems Science. New Jersey: World Scientific, 2015.
[3] Clark, George C., and J. Bibb Cain. Error-Correction Coding for Digital Communications. Applications of Communications Theory. New York: Plenum Press, 1981.
[4] Moon, Todd K. Chapter 6, Error Correction Coding: Mathematical Methods and Algorithms. Hoboken, N.J: Wiley-Interscience, 2005.
[5] Chien, R. “Cyclic Decoding Procedures for Bose- Chaudhuri-Hocquenghem Codes.” IEEE Transactions on Information Theory 10, no. 4 (October 1964): 357–63. https://doi.org/10.1109/TIT.1964.1053699.
[6] Forney, G. “On Decoding BCH Codes.” IEEE Transactions on Information Theory 11, no. 4 (October 1965): 549–57. https://doi.org/10.1109/TIT.1965.1053825.