
A simple 'getOpts' type script to validate input parameters.
validateInput started when creating saveppt2. There was a need to take a large number of inputs, in any order, and make them usable to the script. Checking if an input argument has been passed can be
- 703 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
22 Apr 2010

OptimTraj -- Trajectory Optimization Library
A toolbox for Matlab, for solving continuous time trajectory optimization problems
- 3.3K (All time)
- 4 (Last 30 days)
- 4.9 / 5
- Community
-
6 Jun 2023

Particle Swarm Optimization Research Toolbox
Gbest PSO, Lbest PSO, RegPSO, GCPSO, MPSO, OPSO, Cauchy mutation, and hybrid combinations
lengthy histories is recommended except when generating data to be published or verifying proper toolbox functioning, in which case histories should be analyzed.+ Automatic input validation assertively
- 35.7K (All time)
- 6 (Last 30 days)
- 4.4 / 5
- Community
-
15 May 2011

Like the built-in input function but with the ability to impose constraints and checks on user input
validateattributes(A,classes,attributes).k = VALIDATEDINPUT(prompt,validationFcn) checks the input using the provided validationFcn.If the user input provided at the prompt is invalid, the user will be informed of the reason why and
- 327 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
16 Oct 2015
- 140 (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
29 Aug 2024
Widgets Toolbox - Compatibility Support
Compatibility Support for Widgets Toolbox content built before to R2020b
- 6.4K (All time)
- 50 (Last 30 days)
- 4.9 / 5
- Community
-
23 Mar 2023

Mex file interface for reading various raster image formats, optionally providing georeferencing.
- 3K (All time)
- 3 (Last 30 days)
- 2.8 / 5
- Community
-
1 Sep 2006

An add-on that allows plotting 2D and 3D robots' workspaces using their DH parameters
- 687 (All time)
- 3 (Last 30 days)
- -- / 5
- Community
-
18 Feb 2024

- 466 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
13 Jul 2020

- 129 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
30 Apr 2019
- 169 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
14 Jul 2014
- 221 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
29 May 2012

Parses, adds defaults and validates the input of functions and methods
classes that are allowed for the value 5. constraints on the value of the input argument ipv is a name/value structure, which holds the complete and validated input data.Documentation
- 816 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
19 Apr 2010
A template for creating repos for Matlab library and application projects
- 77 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
14 Aug 2023

PID, PI-D, I-PD and PIDA genetic algorithm parameters optimization made easy with this GUI
- 472 (All time)
- 10 (Last 30 days)
- -- / 5
- Community
-
16 Jul 2024
- 205 (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
17 Dec 2014

Indian Reference Atmosphere by Sasi (1994) with user's units
Contains classes to represent reference atmospheric models and USER-DEFINED units, and saved object representing Indian Reference Atmosphere
are:Find atmospheric conditions at a given geometric altitude array, with input and output unitsT = Ira.pressure(45, 'mi', 'bar'); % pressure in bar at 45 miles geometric AMSLa = Ira.lapseRate([24, 9, 68; 32
- 120 (All time)
- 5 (Last 30 days)
- -- / 5
- Community
-
10 Oct 2021
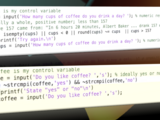
Educational: Validating User Inputs (numbers and strings)
error checking, user stopping, validating user inputs
This code is explained in the following YouTube Video:While Loops - Validate User Input: https://youtu.be/LyKb1MvCiG8 In this video I cover how to code while loops in MATLAB and how these can be used
- 11 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
27 Nov 2021
an implementation of the primal simplex algorithm for computing the minimum cost flow of the graph
arcs, then define the flow network of the given flow network. This function computes the minimum cost flow for the given flow network.input A , D , G “A” is an N by N matrix whose entries a(i,j) denote
- 812 (All time)
- 1 (Last 30 days)
- 4.0 / 5
- Community
-
1 Feb 2012
HRViewer is a matlab software tool designed for in deep viewing and comparing HRV indices computed from different EKG files as well as diffe
input file for HRVviewer. In other word, we compute HRV using HRVmass and view the HRV indices using HRViewer.The important feature of HRViewer is that you can compare HRV measured from different patient
- 187 (All time)
- 5 (Last 30 days)
- -- / 5
- Community
-
9 Dec 2019

Sensor Data Analytics (French Webinar Code)
Signal Processing & Machine Learning workflow on smartphone data for Human Activity Recognition.
- 1.8K (All time)
- 2 (Last 30 days)
- 3.7 / 5
- Community
-
8 Nov 2017
Ultrafast saving of workspace variables as bytestreams. Especially useful for big cells and structs.
- 501 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
10 Sep 2014
- 27 (All time)
- 2 (Last 30 days)
- -- / 5
- Community
-
14 Aug 2023

MATLAB function converts a DICOM file to image file. Validates input, reads DICOM, displays image, saves in chosen format.
MATLAB function converts a DICOM file to image file. Validates input, reads DICOM, displays image, saves in chosen format.
- 6 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
7 Aug 2024
MATLAB toolbox for stochastically rounded elementary arithmetic operations in IEEE 754 floating-point arithmetic.
. 4.4, 2] * twoprodfma: augmented product [Alg. 4.8, 2]The functions in 1. do not check the input arguments, thus are more efficient but less robust. The interface in 2. checks that all input
- 16 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
1 Apr 2020

tiborsimon/simple-input-parser
Easy to use variable lenght input parameter parser mechanism with validation.
MLS package: To be able to install this library as an MLS package, you have to download it from GitHub as an MLS package: https://github.com/tiborsimon/simple-input-parser/releases/latestEasy to use
- 39 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
22 Oct 2015
- 149 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
22 Apr 2016
- 7 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
28 May 2022
kbot_app Basic: 🧠 🔥 What this KBot Demo Will Do ✔ Ask questions about standards ✔ Validate simple “drawing data” (JSON input) ✔ Show erro
🧠 🔥 What this KBot Demo Will Do✔ Ask questions about standards✔ Validate simple “drawing data” (JSON input)✔ Show errors + suggestions✔ Run locally in browser🏗 Tech UsedStreamlit → UI Python →
- 1 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
3 Apr 2026

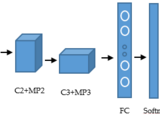
Image Classification using CNN with Multi Input 複数の入力層を持つCNN
This demo shows how to implement convolutional neural network (CNN) for image classification with multi-input. カスタムループを用いて複数入力のCNNを実装します。
Image Classification using Convolutional Neural Network with Multi-Input[English]This demo shows how to implement convolutional neural network (CNN) for image classification with multi-input using
- 1.9K (All time)
- 4 (Last 30 days)
- 4.6 / 5
- Community
-
10 Sep 2021
Additional validator functions for Matlab
Validoozy for Matlab====================In R2017a, Matlab introduced "mustBe*()" validator functions, for doing declarative-ish constraints on properties and function arguments. Validoozy provides
- 5 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
11 Sep 2022

Set functions with multiple inputs
Intersectm, ismemberm, setdiffm, setxorm, unionm with multiple inputs. Ex: intersectm(a,b,c,…).
Have you ever tried to find the common elements/rows to more than two sets without using a loop?Now you can with multiple-input set functions: Intersectm, ismemberm, setdiffm, setxorm, unionm.Brief
- 1.6K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
6 Aug 2010
Simple Deep Learning Algorithms with K-fold Cross-Validation
This toolbox offers convolution neural networks (CNN) using k-fold cross-validation, which are simple and easy to implement.
- 3.4K (All time)
- 3 (Last 30 days)
- 5.0 / 5
- Community
-
20 Dec 2020

inputsdlg: Enhanced Input Dialog Box
Predefined dialog box function to accept user inputs of several forms
DeleteFcn callbacks. The callback function takes additional input arguments to standard MATLAB callback arguments.- INPUTSDLG returns the user entries in a cell or in a structure- INPUTSDLG is backward
- 9.5K (All time)
- 7 (Last 30 days)
- 4.7 / 5
- Community
-
30 Jun 2015
A function which Validates given IPV4address.
the IP address you want to Validate . This function returns a value 1 if success else 0 . If any other matlab data types apart from string type are passed to this function then also it returns a value 0
- 1.5K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
17 Jun 2009

- 401 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
16 May 2016
- 1.9K (All time)
- 1 (Last 30 days)
- 4.5 / 5
- Community
-
2 Jun 2014
- 2K (All time)
- 8 (Last 30 days)
- 5.0 / 5
- Community
-
29 Jan 2018

- 1.1K (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
1 Sep 2011
CVAP: Cluster Validity Analysis Platform (cluster analysis and validation tool)
supplying over 17 validity indices and 5 clustering algorithms based on GUI
Cluster validation is an important and necessary step in cluster analysis. This visual cluster validation tool CVAP based on GUI provides important tools and convenient analysis environment for
- 12.6K (All time)
- 3 (Last 30 days)
- 4.3 / 5
- Community
-
25 Jul 2009

Allows to read input keyboard during Simulink simulation
Improvements respect original "Simulink Keyboard Input":- second output for triggering key arrival (for Subsystems and Char)- inherited sampling time- close window on close- handle of window as state
- 7.5K (All time)
- 10 (Last 30 days)
- 4.6 / 5
- Community
-
2 Dec 2016

Accept keyboard input during a running Simulink simulation.
This is an S-function designed to accept keyboard input from a figure window during a running Simulink simulation.This requires no special toolboxes.
- 5.6K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
30 Sep 2004
p_input - mimic functionality of "input" while publishing.
This function mimics the behavior of the "input" function but works while publishing.
Function p_input (short for "publish_input"). This function operates similar to MATLAB's "input" function. The arguments are identical.This function mimics the behavior of MATLAB's "input" function
- 667 (All time)
- 1 (Last 30 days)
- 4.9 / 5
- Community
-
18 Jun 2012
- 1.3K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
29 Sep 2021

Route Validation in MANETs using MLP
Route Validation in Moblie Ad-hoc Networks using Multi-Layer Perceptron Neural Network
- 218 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
2 Feb 2020
- 19 (All time)
- 1 (Last 30 days)
- -- / 5
- Community
-
11 Sep 2022

A Matlab function For Randomly Partitioning Date into Training, Validation and Testing Data
A Matlab function For Randomly Partitioning Date into Training, Validation and Testing Data
This function randomly partitions data into training, validation and testing data using Cross Validation. Partitioning data in this manner is commonly used for determining the performance of
- 794 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
1 Apr 2015
- 4.3K (All time)
- 84 (Last 30 days)
- 5.0 / 5
- Community
-
17 Sep 2017
Like Matlab's "input" function, but with a default that you can select by simply hitting Enter.
- 718 (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
22 Jun 2009

Quantitative Magnetic Resonance Imaging Made Easy with qMRLab: Use GUI or CLI to fit and simulate a myriad of qMRI models.
- 924 (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
7 Dec 2023

Copyright 2018-2024 The MathWorks, Inc.
# MathWorks :registered: Tool Validation Kit
- 539 (All time)
- 3 (Last 30 days)
- 4.4 / 5
- Community
-
16 Sep 2025

Resnet50 and other pre-trained models with cross-validation
Resnet50 and other pre-trained models with cross-validation Matlab code .all evaluation metrics are included
Resnet50, densnet201, resnet18, vgg16, exception net, test network are pre-trained models with cross-validation Matlab code. all evaluation metrics are
- 1.6K (All time)
- 6 (Last 30 days)
- 5.0 / 5
- Community
-
14 Feb 2021
- 1.5K (All time)
- 9 (Last 30 days)
- 4.8 / 5
- Community
-
29 Jan 2018
A robot to help you click mouse and typing in other application's window
DLL you are looking for!It does the job in simple way:1. it can insert a string into the Window's keyboard input string,as if you have typed the string from the keyboard.2. It can move the mouse to
- 1.4K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
6 Jul 2007
darkb2r(cmin_input,cmax_input)
matlab blue-white-red colorbar, while zero always corresponds to white color. see also b2r
, respectively. The color white always correspondes to value zero. You should input two values like caxis in matlab, that is the min and the max value of color values designed. e.g. colormap(darkb2r(-3,5
- 1.1K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
9 Apr 2015
matlab blue-white-red colorbar, while zero always corresponds to white color. see also darkb2r
, respectively. The color white always correspondes to value zero. You should input two values like caxis in matlab, that is the min and the max value of color values designed. e.g. colormap(b2r(-3,5
- 5K (All time)
- 2 (Last 30 days)
- 4.2 / 5
- Community
-
9 Apr 2015
- 1.2K (All time)
- 4 (Last 30 days)
- 5.0 / 5
- Community
-
4 Jun 2014

Segmentation of blood vessels in retinal fundus images using maximum principal curvature
Presented Algorithm segments blood vessels of retinal image with a high degree of accuracy
every pixel of the Gaussian filtered Image.After some contrast enhancement final segmented image is obtained using ISO Data thresholding. This algorithm is validated using images in drive database .
- 1.4K (All time)
- 2 (Last 30 days)
- 5.0 / 5
- Community
-
29 Oct 2017
ProcessNetwork/ProcessNetwork_Software
Functions for the delineation of Dynamical Process Networks using Information Theory
- 1.4K (All time)
- 1 (Last 30 days)
- 5.0 / 5
- Community
-
21 Mar 2016