How to Build a Stateflow Chart | Mission on Mars Robot Challenge
From the series: Mission on Mars Robot Challenge
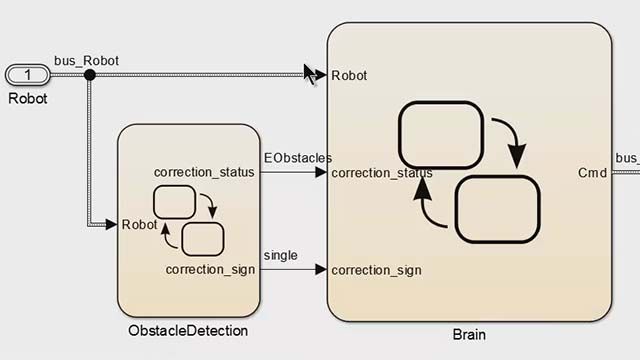
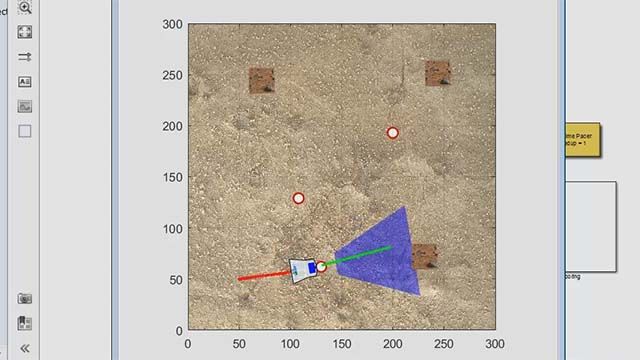
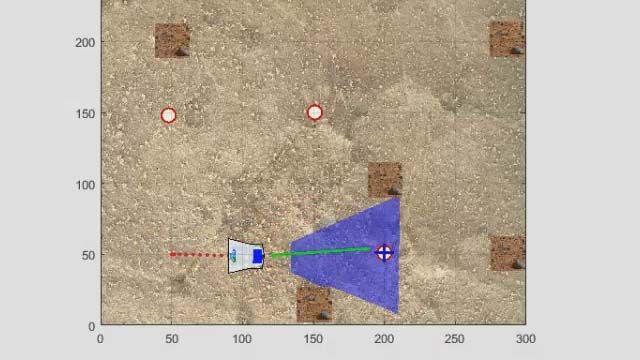
A short introduction on the rover robot camera and instruction on building a Stateflow® chart to move the robot to a specific target.
Published: 23 Mar 2016