Video Player is loading.
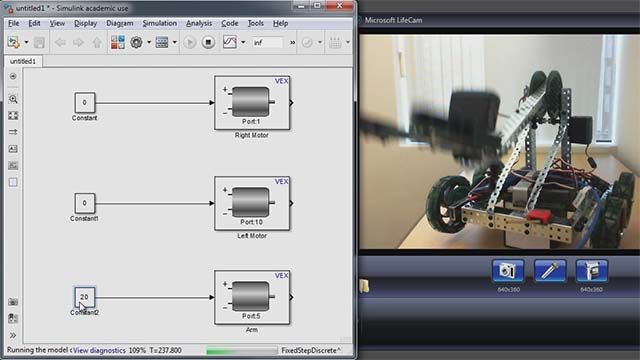
Switching Between Driver and Autonomous Control of VEX Robots
From the series: Robotics Education
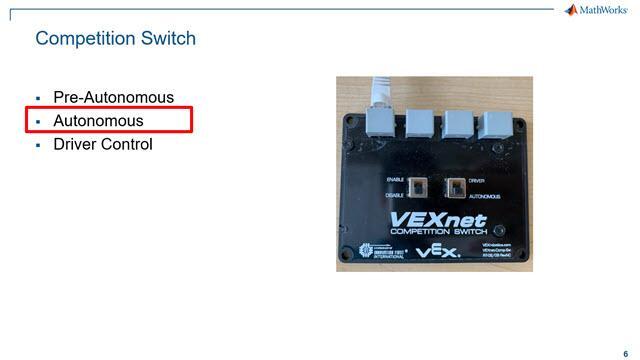
Jose Avendano explains how to take existing MATLAB® and Simulink® algorithms and incorporate them into the VEX Robotics Competition template to trigger Autonomous and Driver Control modes for VEX robots connected to the field Competition Switch. This video also covers how to trigger autonomous algorithms using the VEX gamepad buttons.
For more information, you can access the following resources:
Published: 10 Oct 2019