You are already signed in to your MathWorks Account. Please press the "Submit" button to complete the process.
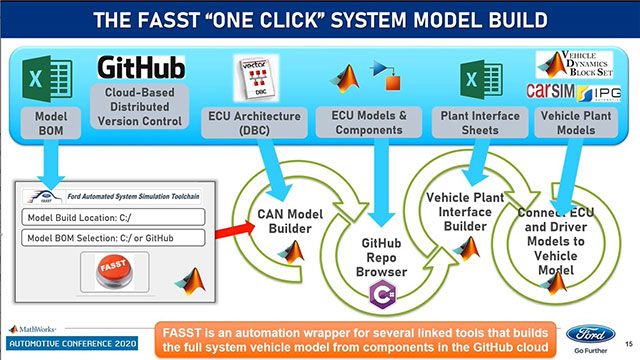
Model-Based Agility with Ford Automated System Simulation Toolchain (FASST)
Nate Rolfes, Ford Raghu Baskaran, Ford Steven Foster, Ford Nick Adams, Ford Robert ter Waarbeek, Ford
Ford Automated System Simulation Toolchain (FASST) is a vehicle simulation toolchain for distributed chassis controls and DAT features used for feature development and verification throughout the development cycle utilizing MIL, SIL, and HIL. FASST is a modern verification method/toolchain that enables Ford engineers to implement agile practices and continuous integration within their Model-Based Design and systems engineering processes. FASST helps develop and build a virtual vehicle, helping tackle all technical and process-related challenges. It also serves as a virtual factory, building the virtual vehicles in an automated fashion. Similar to just-in-time delivery in the physical world, every delivery of a software component can be tested directly in the virtual world. Continuous verification and validation of integrated virtual vehicle can then help detect system issues early on and drive quality and reduced verification costs.
Model-Based Design Maturity: Trends and Learnings from Process Assessments
John Lee, MathWorks
In 2014, MathWorks introduced a formalized Process Assessment framework for benchmarking one organization’s Model-Based Design process against the peers in the industry. Since then, many assessments have been carried out around the world, including with automotive OEMs and suppliers. This presentation will examine the findings from these assessments, including general trends, correlation and propose causations between processes, along with opportunities for tool improvements and recommendations.
Using Model-Based Design for Vehicle Dynamics Simulation
Bennett Norley, Cooper Tire & Rubber Company Sid Attravanam, Cooper Tire & Rubber Company
In a world where rapid cadences for new product launches can be a competitive advantage, adaptable and reliable product simulation is critical. The tire industry is no exception, particularly with increased demands for virtual tire submissions and supplemental vehicle testing.
Though several potent, multi-body vehicle simulation packages currently exist, they require detailed subcomponent-level data which automotive OEMs are rightfully reluctant to share. Even with access to these proprietary design parameters, thriving in the replacement tire market requires testing tire performance across a diverse vehicle fleet. It is expensive to collect the comprehensive models needed to represent the vast range of consumer-driven vehicles.
Cooper Tire & Rubber Company teamed up with MathWorks to advance and refine a robust set of tools to drive technological breakthroughs in vehicle dynamics simulation. By utilizing Vehicle Dynamics Blockset™, Model-Based Calibration Toolbox™, Simulink Design Optimization™, and other innovative methodologies, we can predict vehicle response, tire-generated forces and moments, and a suite of objective testing metrics.
This presentation will share Cooper’s high-level approach to vehicle simulation, how MathWorks has helped augment our computational procedures, and how Cooper is expediting the tire development process by simulating on-vehicle performance.
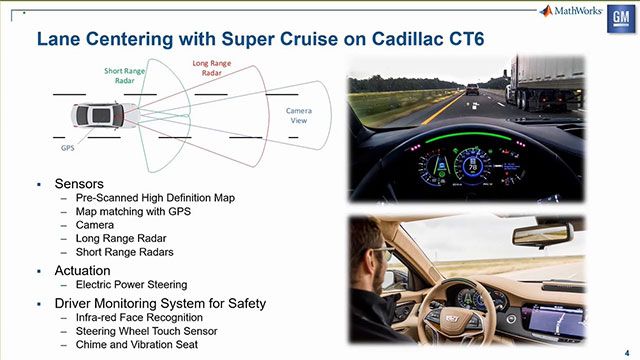
Creating Driving Scenarios from Recorded Vehicle Data for Validating Lane Centering Systems in Highway Traffic
Gabriel Choi, General Motors Seo-Wook Park, MathWorks
Automotive companies typically have an abundance of real data recorded which is often not suitable to test closed-loop control systems. This presentation introduces a methodology for creating virtual driving scenarios from recorded vehicle data to enable closed-loop simulation. This methodology is applied to test a lane-centering application.
What’s New in MATLAB and Simulink for ADAS and Automated Driving
Mark Corless, MathWorks
As the level of automation increases, the use scenarios become less restricted and the testing requirements increase, making the need for modeling and simulation more critical. In this session, you will learn and how MATLAB® and Simulink® support engineers building automated driving systems with increased levels of automation. You will learn about new features in Releases 2019b and 2020a for:
Designing perception, planning, and controls components
Testing by simulating driving scenarios and sensor models
Deploying by generating C/C++ code
You will learn about these topics through examples that you can reproduce when you return to your office.
Developing Planning and Controls for Highway Lane Change Maneuvers
Seo-Wook Park, MathWorks
An automated lane change maneuver (LCM) system enables a vehicle to automatically move from one lane to another lane. The LCM system identifies objects surrounding the vehicle, plans an optimal trajectory that avoids these objects, and steers the ego vehicle along this trajectory. In this session, you will learn how you can use MATLAB® and Simulink® to:
Model the planning and controls components
Model scenarios and vehicle dynamics to test components
Simulate and assess behavior with traffic on straight and curved roads
Toolchain Definition and Integration for ISO 26262–Compliant Development
Dave Hoadley, MathWorks
Simulink® and Stateflow® are used extensively for ISO 26262–compliant embedded software development, from ASIL-A through ASIL-D. The algorithmic needs of advanced driver assistance and autonomous driving applications are often expressed more naturally in MATLAB®, however. In this session, Dave Hoadley discusses the challenges and best practices for achieving ISO 26262 compliance in a mixed MATLAB and Simulink paradigm. Examples include applying verification and validation tools to software components authored primarily in MATLAB and integrating Simulink with collaboration tools such as Git™ and Gerrit Code Review.
Designing the Farm of the Future
Emily Horn, John Deere
John Deere is the world’s premier farm equipment manufacturer and is committed to those linked to the land. We believe that in serving them, we support improving the quality of life for people all around the world. We see several major global trends affecting the agriculture industry: population growth, increased demand for food, larger farms, skilled labor shortages, and environmental sustainability. Within John Deere, the modeling community is building the infrastructure to meet these challenges efficiently and effectively through the use of systems engineering, model-based development, and simulation. This development balances the need for cutting edge tools with stable enterprise-wide infrastructure. This presentation will highlight the technology that Deere is currently using and developing to meet our needs spanning from component design to designing the farm of the future.
Advantages of Level 2+ Advanced Driver Assistance Application Prototyping using Model-Based Design
Sunny Sun, AVL
In this presentation, AVL will demonstrate its Level 2+ advanced driver assistance system (ADAS) applications algorithm development and implementation, automatic code generation, control hardware prototyping, and vehicle testing using Model-Based Design with MATLAB® and Simulink®, including successful use case of advanced algorithms and data structure. The advantages of Model-Based Design in modularity, efficiency, and team synergy will also be discussed, facilitating AVL's rapid, white box, platform agnostic, and partnership-open ADAS controls development.
Simulink for Virtual Vehicle Development
Chris Fillyaw, MathWorks Mike Sasena, MathWorks
In the presentation, MathWorks engineers will discuss use cases of virtual vehicle simulation and how Simulink® as a platform enables the development and execution of such large-scale models. New Simulink capabilities and relevant model best practices will also be introduced.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.